简介
重写Bt项目在Linux下面已经差不多已经接近尾声,后续在Linux下面测试稳定后,就要移植到Android上面,这篇文章主要介绍重写的使用Libuv中要注意的问题,关于libuv的介绍,可以查看这个链接
https://github.com/libuv/libuv
libuv是一个支持多平台的异步IO库。它主要是为了node.js而开发的,但是也可以用于Luvit, Julia, pyuv及其他软件。
1.libuv是使用C标准写的
2.tcp的接收新连接是共用一个loop的
3.udp处理完数据的时候,每次返回值都为0
4.发送数据的时候是不提供缓冲区
5.退出的时候如何正确的清理释放资源
6.libuv线程间的通信问题
libuv是使用C标准写的
原本打算整个项目使用C++11标准使用智能指针的方式来写,这样可以减少内存泄露的问题,而且可以使用C++11中的异常等的新特性,由于libuv使用了C标准,所以导致接口的回调部分都要用C的方式,虽然尽量使用new,delete来代替malloc,free,但是相比智能指针还是存在很多不安全的地方,而且我们知道在C中是不存在异常的方式,是否执行成功都是通过返回值的方式来代替的,更此次的是有些地方直接使用assert的方式,一旦assert不通过,就直接程序崩溃
tcp的接收新连接是共用一个loop的
我们之前项目是使用Aria2的单线程版本强制改成多线程的方式而且加了很多的支持,导致很不稳定,我们重写的目的也就是要达到稳定,所以我们的方案是对于每一个连接都是一个新的线程,不管是tcp还是udp,每个线程里面都有一个loop,每个线程的变量尽量的做到线程独有,这样就会稳定的多,但是原本libuv的tcp默认accept是共用一个looper的,其实这个问题,官网上也有人提出,下面是修改的方案
//记得在socket不需要后,调用uv_close。如果你不需要接受连接,你甚至可以在uv_listen的回调函数中调用uv_close
void UVSocketCore::tcp_on_connection(uv_stream_t *server, int status) {
auto socketCore = static_cast<UVSocketCore*>((server->data));
//新连接到来的回调函数
if (status < 0) {
G_LOG_DEBUG("New connection error %s\n", uv_strerror(status));
//错误回调
socketCore->onTcpServerConnectionCallback_(nullptr);
return;
}
if(socketCore->acceptConnect(server)){
//错误回调
socketCore->onTcpServerConnectionCallback_(nullptr);
}
}
int UVSocketCore::acceptConnect(uv_stream_t *server){
//创建一个uv_tcp_t的客户端
uv_tcp_t *client = new uv_tcp_t;
//执行初始化
uv_tcp_init(loop_.get(), client);
int ret = uv_accept(server, (uv_stream_t*) client);
if (ret == 0) {
G_LOG_DEBUG("server_on_new_connection client fd %d",client->io_watcher.fd);
int fds[2];
//成功之后,创建sockfd 对
int rv = uv_get_socketpair(fds,0);
CHECK_UV_ASSERT(rv);
//初始化当前的pipet
uv_pipe_t* pipet = new uv_pipe_t;
//初始化主线程的main_pipet 句柄
uv_pipe_init(loop_.get(), pipet, 1);
//设置当前关联,监听的fd
uv_pipe_open(pipet, fds[0]);
//封装要传递的数据
PipeThreadRunStruct* threadRunData = new PipeThreadRunStruct;
threadRunData->socketCore = this;
threadRunData->fd = fds[1];
//成功之后,再创建线程
std::thread connectThread(&UVSocketCore::connect_thread_run,this,threadRunData);
// 分离线程,让线程自己回收资源。
connectThread.detach();
PipeWriteStruct * writeData = new PipeWriteStruct;
//执行发送
char data[10] = {"a"};
uv_write_t * req = new uv_write_t;
uv_buf_t buf = uv_buf_init(data, 1);
writeData->client = client;
writeData->pipe = pipet;
//存储携带的数据
req->data = writeData;
uv_write2(req, (uv_stream_t*) pipet, &buf, 1,(uv_stream_t*) client, pipe_write_finish);
G_LOG_DEBUG("UVSocketCore::acceptConnect clear childThread finish");
}else{
G_LOG_DEBUG("uv_accept error %s\n", uv_strerror(ret));
//释放操作
uv_close((uv_handle_t *)client,NULL);
delete(client);
return SocketAcceptError;
}
return SUCCESS;
}
void UVSocketCore::connect_thread_run(void *arg){
PipeThreadRunStruct* threadData = static_cast<PipeThreadRunStruct*>(arg);
UVSocketCore* socketCore = threadData->socketCore;
int fd = threadData->fd;
//释放
delete(threadData);
//改用智能指针
auto thread_pipe = std::make_shared<uv_pipe_t>();
auto threadLoop = std::make_shared<uv_loop_t>();
uv_loop_init(threadLoop.get());
//执行管道的初始化
uv_pipe_init(threadLoop.get(), thread_pipe.get(), 1 /* ipc */);
//打开管道 打开一个已存在的文件描述符或者句柄作为一个管道。
uv_pipe_open(thread_pipe.get(), fd);
AcceptUvData acceptObj;
//默认值
acceptObj.error_code = SUCCESS;
acceptObj.client = nullptr;
acceptObj.current_loop = threadLoop;
thread_pipe->data = static_cast<void *>(&acceptObj);
//执行监听操作
uv_read_start((uv_stream_t*) (thread_pipe.get()), alloc_buffer,pipe_on_new_connection);
//开始事件循环
uv_run(threadLoop.get(), UV_RUN_DEFAULT);
//引擎退出了,我们要判断错误码,是否执行对应的清理操作
if(acceptObj.error_code){
//非成功,失败的时候才要清理,正常退出,清理操作
uv_loop_close(threadLoop.get());
//错误
socketCore->onTcpServerConnectionCallback_(nullptr);
}else{
//成功
if (socketCore->onTcpServerConnectionCallback_) {
socketCore->onTcpServerConnectionCallback_(acceptObj.client);
}
}
G_LOG_DEBUG("UVSocketCore::connect_thread_run finish");
}
//子线程管道收到了数据
void UVSocketCore::pipe_on_new_connection(uv_stream_t *q, ssize_t nread, const uv_buf_t *buf){
AcceptUvData *pAcceptObj = static_cast<AcceptUvData*>(q->data);
if (nread < 0) {
G_LOG_DEBUG("Pipe Read error %s\n", uv_err_name(nread));
//带回错误码
pAcceptObj->error_code = LibUvPipeError;
//错误的化,由于当前只有一个handle,我们直接执行关闭操作,由libuv来执行退出操作
uv_close((uv_handle_t*) q, NULL);
delete[](buf->base);
return;
}
//正常读取到数据
uv_pipe_t *pipe = (uv_pipe_t*) q;
if (!uv_pipe_pending_count(pipe)) {
G_LOG_DEBUG("No pending count\n");
delete[](buf->base);
return;
}
uv_handle_type pending = uv_pipe_pending_type(pipe);
assert(pending == UV_TCP);
//创建对应的tcp SocketCore
auto tcpSocket = std::make_shared<UVSocketCore>(pAcceptObj->current_loop,SOCK_STREAM);
int result = tcpSocket->acceptPipe(pipe);
pAcceptObj->error_code = result;
if(!result){
//正常执行,我们让loop退出,从而子线程退出,但是当前的loop不能执行销毁操作,要给后面的客户端使用,这里由于 tcpSocket 内部会含有一个handle所以要手动调用uv_stop
uv_stop(q->loop);
pAcceptObj->client = tcpSocket;
}
//不管成功,还是失败都要调用close 方法,方便引擎
uv_close((uv_handle_t*) q, NULL);
delete[](buf->base);
}
int UVSocketCore::acceptPipe(uv_pipe_t* pipe){
enSureTcpHandle();
int r = uv_accept((uv_stream_t* )pipe, (uv_stream_t*) tcp_handle_);
if (r == 0) {
//之后客户端的fd执行监听操作
uv_read_start((uv_stream_t *)tcp_handle_, alloc_buffer, tcp_on_read);
//当前连接的tcp handle中得到当前连接的地址信息
struct sockaddr addr = uvTcpGetAddr(tcp_handle_);
connectAddr_ = *(struct sockaddr_in *) &addr;
return SUCCESS;
}
//失败,执行关闭
closeTcp();
return LibUvPipeError;
}
int uv_accept(uv_stream_t* server, uv_stream_t* client) {
int err;
assert(server->loop == client->loop);
if (server->accepted_fd == -1)
return UV_EAGAIN;
switch (client->type) {
case UV_NAMED_PIPE:
case UV_TCP:
err = uv__stream_open(client,
server->accepted_fd,
UV_HANDLE_READABLE | UV_HANDLE_WRITABLE);
if (err) {
/* TODO handle error */
uv__close(server->accepted_fd);
goto done;
}
break;
case UV_UDP:
err = uv_udp_open((uv_udp_t*) client, server->accepted_fd);
if (err) {
uv__close(server->accepted_fd);
goto done;
}
break;
default:
return UV_EINVAL;
}
client->flags |= UV_HANDLE_BOUND;
...
}
int uv__stream_open(uv_stream_t* stream, int fd, int flags) {
#if defined(__APPLE__)
int enable;
#endif
if (!(stream->io_watcher.fd == -1 || stream->io_watcher.fd == fd))
return UV_EBUSY;
assert(fd >= 0);
stream->flags |= flags;
if (stream->type == UV_TCP) {
if ((stream->flags & UV_HANDLE_TCP_NODELAY) && uv__tcp_nodelay(fd, 1))
return UV__ERR(errno);
/* TODO Use delay the user passed in. */
if ((stream->flags & UV_HANDLE_TCP_KEEPALIVE) &&
uv__tcp_keepalive(fd, 1, 60)) {
return UV__ERR(errno);
}
}
#if defined(__APPLE__)
enable = 1;
if (setsockopt(fd, SOL_SOCKET, SO_OOBINLINE, &enable, sizeof(enable)) &&
errno != ENOTSOCK &&
errno != EINVAL) {
return UV__ERR(errno);
}
#endif
stream->io_watcher.fd = fd;
return 0;
}
大致就是先调用原本的libuv,accept的操作,获取到对应的fd,此时是共用一个loop的,原后通过创建一个管道,管道的一端自己保留,另一端传给另一个线程,另一个线程在自己的线程里面创建当前线程的loop,然后创建uv_pipe_t 事件,设置关联我们传递进来的管道的另一端,并且设置监听事件,之后,主线程往这个管道写内容,写的内容可以随便,那么这个线程就可以收到这个事件那么就会触发pipe_on_new_connection 回调,在这个回调函数里面我们利用当前线程的Loop对象 创建一个 UVSocketCore 对象,然后调用acceptPipe完成转换,其实内部也是通过调用uv_accept方式来完成转换的,而uv_accept 其实也没做什么,其实就是将原本tcp的fd转到我们新的UVSocketCore里面,stream->io_watcher.fd = fd; 就是最根本实现,这里还要注意的一点就是当转换完成之后我们要让这个线程退出,而loop不能销毁,因为这个loop后续要放到另一个线程里面完成后续的通信,所以我们要调用uv_stop(q->loop);这个内部就是退出事件循环,而不会清理资源,那么下一个线程可以继续使用这个looper
udp处理完数据的时候,每次返回值都为0
//要监听的udp的io事件发生了变化
static void uv__udp_io(uv_loop_t* loop, uv__io_t* w, unsigned int revents) {
uv_udp_t* handle;
handle = container_of(w, uv_udp_t, io_watcher);
assert(handle->type == UV_UDP);
//如果当前的事件为数据到来,执行数据的接收
if (revents & POLLIN)
uv__udp_recvmsg(handle);
//如果当前的事件为写数据,执行写数据
if (revents & POLLOUT) {
//执行发送数据包
uv__udp_sendmsg(handle);
//处理已经发送的内容
uv__udp_run_completed(handle);
}
}
static void uv__udp_recvmsg(uv_udp_t* handle) {
struct sockaddr_storage peer;
struct msghdr h;
ssize_t nread;
uv_buf_t buf;
int flags;
int count;
assert(handle->recv_cb != NULL);
assert(handle->alloc_cb != NULL);
/* Prevent loop starvation when the data comes in as fast as (or faster than)
* we can read it. XXX Need to rearm fd if we switch to edge-triggered I/O.
*/
count = 32;
do {
buf = uv_buf_init(NULL, 0);
handle->alloc_cb((uv_handle_t*) handle, 64 * 1024, &buf);
if (buf.base == NULL || buf.len == 0) {
handle->recv_cb(handle, UV_ENOBUFS, &buf, NULL, 0);
return;
}
assert(buf.base != NULL);
memset(&h, 0, sizeof(h));
memset(&peer, 0, sizeof(peer));
h.msg_name = &peer;
h.msg_namelen = sizeof(peer);
h.msg_iov = (void*) &buf;
h.msg_iovlen = 1;
do {
nread = recvmsg(handle->io_watcher.fd, &h, 0);
}
while (nread == -1 && errno == EINTR);
if (nread == -1) {
if (errno == EAGAIN || errno == EWOULDBLOCK)
handle->recv_cb(handle, 0, &buf, NULL, 0);
else
handle->recv_cb(handle, UV__ERR(errno), &buf, NULL, 0);
}
else {
flags = 0;
if (h.msg_flags & MSG_TRUNC)
flags |= UV_UDP_PARTIAL;
handle->recv_cb(handle, nread, &buf, (const struct sockaddr*) &peer, flags);
}
}
/* recv_cb callback may decide to pause or close the handle */
while (nread != -1
&& count-- > 0
&& handle->io_watcher.fd != -1
&& handle->recv_cb != NULL);
}
我们通过 man 2 recvmsg 查看函数的介绍,通过介绍我们可以知道如果当前没有数据可以读取,比如出现了 EAGAIN 或者 EWOULDBLOCK错误,就会返回 -1,而且处理的回调函数返回值为0handle->recv_cb(handle, 0, &buf, NULL, 0);正常来说,对于recvmsg 返回值为0代表正在关闭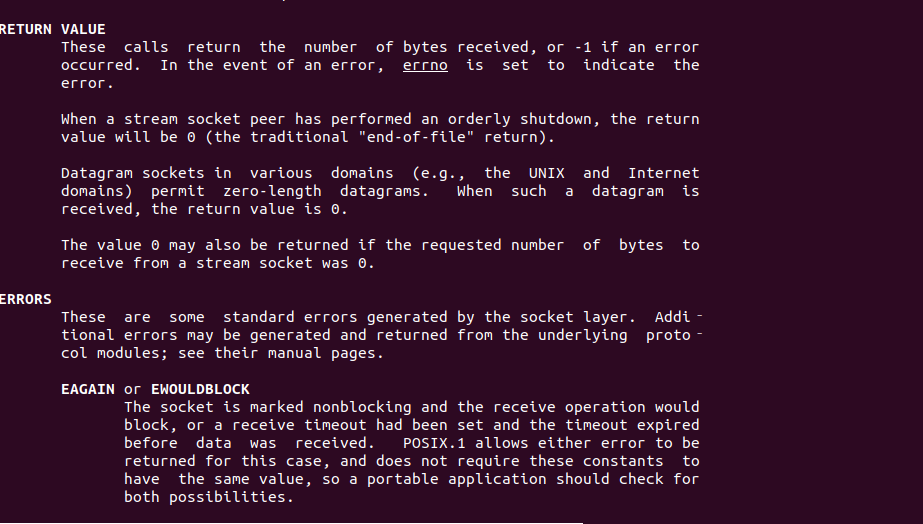
发送数据的时候是不提供缓冲区
对于这个限制,官网也是有说的,在api中也是有说明,但是比较坑的是tcp的发送是有说明的,但是对于udp的发送函数并没有说明,关于没有提供缓冲区的,我上一篇文章已经有体现
//tcp发送函数
/* The buffers to be written must remain valid until the callback is called.
* This is not required for the uv_buf_t array.
*/
int uv_write(uv_write_t* req,
uv_stream_t* handle,
const uv_buf_t bufs[],
unsigned int nbufs,
uv_write_cb cb) {
return uv_write2(req, handle, bufs, nbufs, NULL, cb);
}
//udp发送函数
int uv_udp_send(uv_udp_send_t* req,
uv_udp_t* handle,
const uv_buf_t bufs[],
unsigned int nbufs,
const struct sockaddr* addr,
uv_udp_send_cb send_cb) {
int addrlen;
addrlen = uv__udp_check_before_send(handle, addr);
if (addrlen < 0)
return addrlen;
return uv__udp_send(req, handle, bufs, nbufs, addr, addrlen, send_cb);
}
这里主要大致说一下对于tcp和udp的差异,tcp其实是一个发送完再发送一个的,而udp可以做到统一集中发送,下面是源码的体现
tcp的发送函数
static void uv__write(uv_stream_t* stream) {
...
if (QUEUE_EMPTY(&stream->write_queue))
return;
q = QUEUE_HEAD(&stream->write_queue);
req = QUEUE_DATA(q, uv_write_t, queue);
assert(req->handle == stream);
/*
* Cast to iovec. We had to have our own uv_buf_t instead of iovec
* because Windows's WSABUF is not an iovec.
*/
assert(sizeof(uv_buf_t) == sizeof(struct iovec));
iov = (struct iovec*) &(req->bufs[req->write_index]);
iovcnt = req->nbufs - req->write_index;
iovmax = uv__getiovmax();
...
do
n = uv__writev(uv__stream_fd(stream), iov, iovcnt);
while (n == -1 && RETRY_ON_WRITE_ERROR(errno));
if (n == -1 && !IS_TRANSIENT_WRITE_ERROR(errno, req->send_handle)) {
err = UV__ERR(errno);
goto error;
}
if (n >= 0 && uv__write_req_update(stream, req, n)) {
uv__write_req_finish(req);
return; /* TODO(bnoordhuis) Start trying to write the next request. */
}
...
}
//使用udp发送数据
static void uv__udp_sendmsg(uv_udp_t* handle) {
uv_udp_send_t* req;
QUEUE* q;
struct msghdr h;
ssize_t size;
//一次就将当前handle的 write_queue 队列的内容,执行发送
while (!QUEUE_EMPTY(&handle->write_queue)) {
//获取到队列的首元素
q = QUEUE_HEAD(&handle->write_queue);
assert(q != NULL);
req = QUEUE_DATA(q, uv_udp_send_t, queue);
assert(req != NULL);
//往下走的就是都要发送的内容
memset(&h, 0, sizeof h);
if (req->addr.ss_family == AF_UNSPEC) {
h.msg_name = NULL;
h.msg_namelen = 0;
} else {
h.msg_name = &req->addr;
if (req->addr.ss_family == AF_INET6)
h.msg_namelen = sizeof(struct sockaddr_in6);
else if (req->addr.ss_family == AF_INET)
h.msg_namelen = sizeof(struct sockaddr_in);
else if (req->addr.ss_family == AF_UNIX)
h.msg_namelen = sizeof(struct sockaddr_un);
else {
assert(0 && "unsupported address family");
abort();
}
}
//要发送数据的赋值
h.msg_iov = (struct iovec*) req->bufs;
h.msg_iovlen = req->nbufs;
//执行发送
do {
size = sendmsg(handle->io_watcher.fd, &h, 0);
} while (size == -1 && errno == EINTR);
if (size == -1) {
//如果当前是写缓冲区满了,直接break掉,下次触发
if (errno == EAGAIN || errno == EWOULDBLOCK || errno == ENOBUFS)
break;
}
req->status = (size == -1 ? UV__ERR(errno) : size);
/* Sending a datagram is an atomic operation: either all data
* is written or nothing is (and EMSGSIZE is raised). That is
* why we don't handle partial writes. Just pop the request
* off the write queue and onto the completed queue, done.
*/
//发送数据报是一项原子操作:要么所有数据被写或什么都不写(并且EMSGSIZE被引发)。那是为什么我们不处理部分写入。只是弹出请求从写队列移到完成队列,完成。
QUEUE_REMOVE(&req->queue);
QUEUE_INSERT_TAIL(&handle->write_completed_queue, &req->queue);
uv__io_feed(handle->loop, &handle->io_watcher);
}
}
可以发现tcp是一个发完就处理完成的回调,而udp是一个循环,直到发到缓冲区满才停止发送
退出的时候如何正确的清理释放资源
其实关于libuv的文档已经官方的demo,甚至网上的资料都非常的少,甚至官方的demo写的都很不规范,比如一大堆的资源没有清理,内存没有释放,我发现这个问题还是在模拟android上面频繁的点击暂停恢复的时候出现的,下面是对应的代码模拟
while(true){
#ifdef CLIENT
sleep(1);
BtManager::getInstance()->pauseDownload(model);
sleep(1);
BtManager::getInstance()->resumeDownload(model);
#else
sleep(1);
#endif
}
下面出现的错误,
要想查看linux下面能支持的最大文件描述符的数量,可以执行 ulimit -n 的命令输出,我当前的电脑是显示为1024个,出现了这个问题说明肯定是资源释放的问题,要想查看当前进程打开的文件描述符可以使用 lsof -p 进程号 得到当前进程的所有打开的文件描述符,通过查看发现是libuv的释放有问题,libuv的释放函数为 uv_loop_close
int uv_loop_close(uv_loop_t* loop) {
QUEUE* q;
uv_handle_t* h;
#ifndef NDEBUG
void* saved_data;
#endif
if (uv__has_active_reqs(loop)){
//printf("uv_loop_close uv__has_active_reqs \n");
return UV_EBUSY;
}
QUEUE_FOREACH(q, &loop->handle_queue) {
h = QUEUE_DATA(q, uv_handle_t, handle_queue);
if (!(h->flags & UV_HANDLE_INTERNAL)){
//printf("uv_loop_close h->flags & UV_HANDLE_INTERNAL \n");
return UV_EBUSY;
}
}
uv__loop_close(loop);
#ifndef NDEBUG
saved_data = loop->data;
memset(loop, -1, sizeof(*loop));
loop->data = saved_data;
#endif
if (loop == default_loop_ptr)
default_loop_ptr = NULL;
//printf("uv_loop_close close finish \n");
return 0;
}
void uv__loop_close(uv_loop_t* loop) {
uv__signal_loop_cleanup(loop);
uv__platform_loop_delete(loop);
uv__async_stop(loop);
if (loop->emfile_fd != -1) {
uv__close(loop->emfile_fd);
loop->emfile_fd = -1;
}
if (loop->backend_fd != -1) {
uv__close(loop->backend_fd);
loop->backend_fd = -1;
}
uv_mutex_lock(&loop->wq_mutex);
assert(QUEUE_EMPTY(&loop->wq) && "thread pool work queue not empty!");
assert(!uv__has_active_reqs(loop));
uv_mutex_unlock(&loop->wq_mutex);
uv_mutex_destroy(&loop->wq_mutex);
/*
* Note that all thread pool stuff is finished at this point and
* it is safe to just destroy rw lock
*/
uv_rwlock_destroy(&loop->cloexec_lock);
#if 0
assert(QUEUE_EMPTY(&loop->pending_queue));
assert(QUEUE_EMPTY(&loop->watcher_queue));
assert(loop->nfds == 0);
#endif
uv__free(loop->watchers);
loop->watchers = NULL;
loop->nwatchers = 0;
}
通过上面可以发现释放最重要的函数为 uv_loop_close 函数,在之前还有俩个判断,如果满足了前面俩个判断就不会执行到uv_loop_close,前面俩个判断的意思是如果当前含有正在执行的request,或者还有正在执行的Handle数量不为0,那就会执行return,导致这次的释放操作,并没有执行到,故导致资源的泄露,还有如果是下面的这样写也会有问题
uv_close((uv_handle_t*) time_handle_.get(), NULL);
uv_loop_close(uvSocketCore_->getUvLoop().get());
在调用uv_close方法的时候,并不会立马将当前的handle移除出去,而是要等到下一次的轮询才会移除,下面是代码的实现
void uv_close(uv_handle_t* handle, uv_close_cb close_cb) {
assert(!uv__is_closing(handle));
handle->flags |= UV_HANDLE_CLOSING;
handle->close_cb = close_cb;
switch (handle->type) {
case UV_NAMED_PIPE:
uv__pipe_close((uv_pipe_t*)handle);
break;
case UV_TTY:
uv__stream_close((uv_stream_t*)handle);
break;
case UV_TCP:
uv__tcp_close((uv_tcp_t*)handle);
break;
case UV_UDP:
uv__udp_close((uv_udp_t*)handle);
break;
case UV_PREPARE:
uv__prepare_close((uv_prepare_t*)handle);
break;
case UV_CHECK:
uv__check_close((uv_check_t*)handle);
break;
case UV_IDLE:
uv__idle_close((uv_idle_t*)handle);
break;
case UV_ASYNC:
uv__async_close((uv_async_t*)handle);
break;
case UV_TIMER:
uv__timer_close((uv_timer_t*)handle);
break;
case UV_PROCESS:
uv__process_close((uv_process_t*)handle);
break;
case UV_FS_EVENT:
uv__fs_event_close((uv_fs_event_t*)handle);
break;
case UV_POLL:
uv__poll_close((uv_poll_t*)handle);
break;
case UV_FS_POLL:
uv__fs_poll_close((uv_fs_poll_t*)handle);
/* Poll handles use file system requests, and one of them may still be
* running. The poll code will call uv__make_close_pending() for us. */
return;
case UV_SIGNAL:
uv__signal_close((uv_signal_t*) handle);
/* Signal handles may not be closed immediately. The signal code will
* itself close uv__make_close_pending whenever appropriate. */
return;
default:
assert(0);
}
uv__make_close_pending(handle);
}
void uv__make_close_pending(uv_handle_t* handle) {
assert(handle->flags & UV_HANDLE_CLOSING);
assert(!(handle->flags & UV_HANDLE_CLOSED));
handle->next_closing = handle->loop->closing_handles;
handle->loop->closing_handles = handle;
}
上面的代码可以发现最终要的是uv__make_close_pending 函数,内部会将当前的handle放到了当前loop的closing_handles队列中,那这个队列什么时候才会处理
static void uv__run_closing_handles(uv_loop_t* loop) {
uv_handle_t* p;
uv_handle_t* q;
p = loop->closing_handles;
loop->closing_handles = NULL;
while (p) {
q = p->next_closing;
uv__finish_close(p);
p = q;
}
}
static void uv__finish_close(uv_handle_t* handle) {
assert(handle->flags & UV_HANDLE_CLOSING);
assert(!(handle->flags & UV_HANDLE_CLOSED));
handle->flags |= UV_HANDLE_CLOSED;
switch (handle->type) {
case UV_PREPARE:
case UV_CHECK:
case UV_IDLE:
case UV_ASYNC:
case UV_TIMER:
case UV_PROCESS:
case UV_FS_EVENT:
case UV_FS_POLL:
case UV_POLL:
case UV_SIGNAL:
break;
case UV_NAMED_PIPE:
case UV_TCP:
case UV_TTY:
uv__stream_destroy((uv_stream_t*)handle);
break;
case UV_UDP:
uv__udp_finish_close((uv_udp_t*)handle);
break;
default:
assert(0);
break;
}
uv__handle_unref(handle);
QUEUE_REMOVE(&handle->handle_queue);
if (handle->close_cb) {
handle->close_cb(handle);
}
}
int uv_run(uv_loop_t* loop, uv_run_mode mode) {
int timeout;
int r;
int ran_pending;
r = uv__loop_alive(loop);
if (!r)
uv__update_time(loop);
while (r != 0 && loop->stop_flag == 0) {
uv__update_time(loop);
uv__run_timers(loop);
ran_pending = uv__run_pending(loop);
uv__run_idle(loop);
uv__run_prepare(loop);
timeout = 0;
if ((mode == UV_RUN_ONCE && !ran_pending) || mode == UV_RUN_DEFAULT)
timeout = uv_backend_timeout(loop);
uv__io_poll(loop, timeout);
uv__run_check(loop);
uv__run_closing_handles(loop);
if (mode == UV_RUN_ONCE) {
/* UV_RUN_ONCE implies forward progress: at least one callback must have
* been invoked when it returns. uv__io_poll() can return without doing
* I/O (meaning: no callbacks) when its timeout expires - which means we
* have pending timers that satisfy the forward progress constraint.
*
* UV_RUN_NOWAIT makes no guarantees about progress so it's omitted from
* the check.
*/
uv__update_time(loop);
uv__run_timers(loop);
}
r = uv__loop_alive(loop);
if (mode == UV_RUN_ONCE || mode == UV_RUN_NOWAIT)
break;
}
/* The if statement lets gcc compile it to a conditional store. Avoids
* dirtying a cache line.
*/
if (loop->stop_flag != 0)
loop->stop_flag = 0;
return r;
}
其实整个libuv就是个无限循环,内部使用了epoll来监听对应的事件,而我们的关闭操作的处理是在uv__run_closing_handles函数触发的,在这个函数里面执行了QUEUE_REMOVE(&handle->handle_queue);才移除出去,所以如果你在调用了stop方法后立马调用close方法也是不会清理的,也即是一定要等到他自动的终止,而不能有任何的干扰操作,这样写也是有目的,因为像tcp或者udp是支持异步写操作的用户提供的写请求,如果当前不能写的话,是会立马返回,libuv内部通过监听可写的事件,当可写事件再次触发,他内部会自动的帮你发送出去,所以内部难免会积累一下要写的内容,所以当你要退出的时候,就要完成这些的清理操作,防止内存泄露,比如udp的关闭操作,内部在移除handle之前会先调用下面的函数,将当前的写请求都释放,回调回去
void uv__udp_finish_close(uv_udp_t* handle) {
uv_udp_send_t* req;
QUEUE* q;
assert(!uv__io_active(&handle->io_watcher, POLLIN | POLLOUT));
assert(handle->io_watcher.fd == -1);
while (!QUEUE_EMPTY(&handle->write_queue)) {
q = QUEUE_HEAD(&handle->write_queue);
QUEUE_REMOVE(q);
req = QUEUE_DATA(q, uv_udp_send_t, queue);
req->status = UV_ECANCELED;
QUEUE_INSERT_TAIL(&handle->write_completed_queue, &req->queue);
}
uv__udp_run_completed(handle);
assert(handle->send_queue_size == 0);
assert(handle->send_queue_count == 0);
/* Now tear down the handle. */
handle->recv_cb = NULL;
handle->alloc_cb = NULL;
/* but _do not_ touch close_cb */
}
根据前面的分析,既然我们不能中断libuv的退出操作,那么程序中就不能使用异常,其实我们在线程中使用libuv,其实我们的代码都是跑在libuv的回调事件中的,如果我们在它的回调里面抛出了一个异常那么就不能按照libuv的原本的逻辑执行退出会导致更严重的问题,可能你会想到发生异常退出的时候,后续再次执行uv_run函数,让他自动的终止,不好意思,这是不可能实现的,下面是分析比如udp当数据发送完成之后,会执行uv__udp_run_completed函数,在这个函数的一开始就会执行 assert(!(handle->flags & UV_HANDLE_UDP_PROCESSING));操作,然后设置这个flaghandle->flags |= UV_HANDLE_UDP_PROCESSING;,在程序的后面执行 handle->flags &= ~UV_HANDLE_UDP_PROCESSING;将这个变量重置回去,假设 我们在执行 req->send_cb(req, req->status);回调函数里面抛出了异常,导致没有重置会这个flag,那么下次重新进来的时候,就会直接导致闪退,因为 assert(!(handle->flags & UV_HANDLE_UDP_PROCESSING));
static void uv__udp_run_completed(uv_udp_t* handle) {
uv_udp_send_t* req;
QUEUE* q;
//标识当前正在处理结果的队列
assert(!(handle->flags & UV_HANDLE_UDP_PROCESSING));
handle->flags |= UV_HANDLE_UDP_PROCESSING;
while (!QUEUE_EMPTY(&handle->write_completed_queue)) {
q = QUEUE_HEAD(&handle->write_completed_queue);
QUEUE_REMOVE(q);
req = QUEUE_DATA(q, uv_udp_send_t, queue);
//从handle中移除当前的req
uv__req_unregister(handle->loop, req);
handle->send_queue_size -= uv__count_bufs(req->bufs, req->nbufs);
handle->send_queue_count--;
//正常的udp请求
if (req->bufs != req->bufsml)
uv__free(req->bufs);
req->bufs = NULL;
if (req->send_cb == NULL)
continue;
/* req->status >= 0 == bytes written
* req->status < 0 == errno
*/
if (req->status >= 0)
req->send_cb(req, 0);
else
req->send_cb(req, req->status);
}
//如果当前handle 要发送的数据队列为空,我们停止写事件的监听
if (QUEUE_EMPTY(&handle->write_queue)) {
/* Pending queue and completion queue empty, stop watcher. */
uv__io_stop(handle->loop, &handle->io_watcher, POLLOUT);
if (!uv__io_active(&handle->io_watcher, POLLIN))
uv__handle_stop(handle);
}
//重置当前没有正在处理完成队列
handle->flags &= ~UV_HANDLE_UDP_PROCESSING;
}
所以最后面,我们的项目由原本使用异常的项目变成了一个无异常的项目,代替的实现就是通过返回值的方式来实现,在知乎各种关于C++是否使用异常好像存在很大的争议,我的观点就是使用异常代码简单清晰,如果使用返回值,代码将变得冗余,啰嗦,比如在多层函数里面,最里面的那层函数发生了错误,你就得一层一层的返回,每一层都要检查上一层的函数调用是否出现了问题,不管怎么样,项目里面去掉了异常,也做到了libuv的正常清理操作
libuv线程间的通信问题
在看libuv源码的时候,发现了他内部一种线程间的通信机制,使用了uv_async_t,下面是代码的实现
void testThread(){
//初始化默认的loop对象
uv_loop_t * loop = uv_loop_new();
uv_async_init(loop, &asyncMain, main_sync_callback);
uv_thread_t hare_id;
uv_thread_t tortoise_id;
uv_thread_create(&tortoise_id, thradA, NULL);
//创建两个线程,第三个参数是传递的参数
uv_thread_create(&hare_id, threadB, NULL);
uv_run(loop, UV_RUN_DEFAULT);
}
//主线程收到了事件的回调函数
void main_sync_callback(uv_async_t *handle) {
struct sendData* senddata = (struct sendData*) handle->data;
printf("mainThread callback recv %s send data \n", senddata->data);
strcpy(senddata->data,"MMMM");
senddata->async->data = senddata;
//发送给发送方
uv_async_send(senddata->async);
}
//第二个线程执行的函数
void thradA(void *arg) {
//初始化默认的loop对象
uv_loop_t * loop = uv_loop_new();
uv_async_init(loop, &asyncA, threadA_sync_callback);
//设置一个定时器,用于后续的发送事件到另一个线程
uv_timer_t timer_req;
uv_timer_init(loop, &timer_req);
uv_timer_start(&timer_req, threadA_time_callback, 2000, 1000);
uv_run(loop, UV_RUN_DEFAULT);
}
//线程A 时间到了的回调函数
void threadA_time_callback(uv_timer_t* handle){
printf("ThreadA time_callback send data \n");
struct sendData* data = (struct sendData *)malloc(sizeof(struct sendData));
data->data = (char *)malloc(20);
memset(data->data,0,20);
strcpy(data->data,"AAAA");
//将当前的Sync对象发给对方
data->async = &asyncA;
asyncMain.data = data;
uv_async_send(&asyncMain);
//关闭定时器
uv_close((uv_handle_t*)handle,NULL);
}
//主线程收到了事件的回调函数
void threadA_sync_callback(uv_async_t *handle) {
struct sendData* senddata = (struct sendData*) handle->data;
printf("ThreadA callback recv %s send data \n", senddata->data);
strcpy(senddata->data,"AAAA");
senddata->async->data = senddata;
//发送给发送方
uv_async_send(senddata->async);
}
也即是通过拿到对方的 uv_async_t 对象使用uv_async_send方法,通知对方,对方在回调函数里面处理发送的内容,我们先分析下代码的实现
int uv_async_send(uv_async_t* handle) {
/* Do a cheap read first. */
if (ACCESS_ONCE(int, handle->pending) != 0)
return 0;
/* Tell the other thread we're busy with the handle. */
if (cmpxchgi(&handle->pending, 0, 1) != 0)
return 0;
/* Wake up the other thread's event loop. */
uv__async_send(handle->loop);
/* Tell the other thread we're done. */
if (cmpxchgi(&handle->pending, 1, 2) != 1)
abort();
return 0;
}
真正的发送函数其实是在 uv__async_send(handle->loop); 内部其实就是使用了管道,写一个字节,另一端在监听这个管道,所以能收到这个事件
static void uv__async_send(uv_loop_t* loop) {
const void* buf;
ssize_t len;
int fd;
int r;
buf = "";
len = 1;
fd = loop->async_wfd;
#if defined(__linux__)
if (fd == -1) {
static const uint64_t val = 1;
buf = &val;
len = sizeof(val);
fd = loop->async_io_watcher.fd; /* eventfd */
}
#endif
do
r = write(fd, buf, len);
while (r == -1 && errno == EINTR);
if (r == len)
return;
if (r == -1)
if (errno == EAGAIN || errno == EWOULDBLOCK)
return;
abort();
}
这里先假设第一次的事件发送出去了,我们看看他的处理函数
static void uv__async_io(uv_loop_t* loop, uv__io_t* w, unsigned int events) {
char buf[1024];
ssize_t r;
QUEUE queue;
QUEUE* q;
uv_async_t* h;
assert(w == &loop->async_io_watcher);
for (;;) {
r = read(w->fd, buf, sizeof(buf));
if (r == sizeof(buf))
continue;
if (r != -1)
break;
if (errno == EAGAIN || errno == EWOULDBLOCK)
break;
if (errno == EINTR)
continue;
abort();
}
QUEUE_MOVE(&loop->async_handles, &queue);
while (!QUEUE_EMPTY(&queue)) {
q = QUEUE_HEAD(&queue);
h = QUEUE_DATA(q, uv_async_t, queue);
QUEUE_REMOVE(q);
QUEUE_INSERT_TAIL(&loop->async_handles, q);
if (0 == uv__async_spin(h))
continue; /* Not pending. */
if (h->async_cb == NULL)
continue;
h->async_cb(h);
}
}
大致就是这里只接收一个字节的内容,因为发送的时候,其实也是发送了一个字节,所以这里就接收一个字节,之后调用了async_cb 回调我们,处理完成之后有一个这样的函数(0 == uv__async_spin(h))
/* Only call this from the event loop thread. */
static int uv__async_spin(uv_async_t* handle) {
int rc;
for (;;) {
/* rc=0 -- handle is not pending.
* rc=1 -- handle is pending, other thread is still working with it.
* rc=2 -- handle is pending, other thread is done.
*/
rc = cmpxchgi(&handle->pending, 2, 0);
if (rc != 1)
return rc;
/* Other thread is busy with this handle, spin until it's done. */
cpu_relax();
}
}
#define ACCESS_ONCE(type, var)
(*(volatile type*) &(var))
UV_UNUSED(static int cmpxchgi(int* ptr, int oldval, int newval)) {
#if defined(__i386__) || defined(__x86_64__)
int out;
__asm__ __volatile__ ("lock; cmpxchg %2, %1;"
: "=a" (out), "+m" (*(volatile int*) ptr)
: "r" (newval), "0" (oldval)
: "memory");
return out;
#elif defined(__MVS__)
unsigned int op4;
if (__plo_CSST(ptr, (unsigned int*) &oldval, newval,
(unsigned int*) ptr, *ptr, &op4))
return oldval;
else
return op4;
#elif defined(__SUNPRO_C) || defined(__SUNPRO_CC)
return atomic_cas_uint((uint_t *)ptr, (uint_t)oldval, (uint_t)newval);
#else
return __sync_val_compare_and_swap(ptr, oldval, newval);
#endif
}
其实上面的这几个函数都是为了保证一次的有效传输,他是怎么保证的呢,首先使用了 volatile大体的检查pending 是否为0,然后使用cmpxchgi也即是使用cpu的加锁指令,这其实就是java的自旋锁的实现,将这个值改为1,代表当前正在占用,然后执行发送函数,发送完之后,再次调用cmpxchgi将他改为2代表我们处理完成了,那什么时候重置回去呢,也即当这次处理完的时候,调用了uv__async_spin 函数,这个函数的内部使用了无限循环保证后续不能再次进入,当它退出的时候,比如为0,或者2的时候就可以退出,代表当前这次传输处理完成,那么下次就可以继续发送了,所以就导致了一个问题,如果有俩个线程同时往一个线程的 发送数据的时候,就会导致同时只能处理一个,而另一个直接被抛弃了,导致消息的丢失



