简介
前面分析了Matrix 中 Trace Canary 模块,了解了对应的检测原理实现,本文继续分析 IO Canary 模块,在分析这块内容的时候最好知道对于IO的性能主要检测的内容有哪些,这个可以参考极客时间的Android 开发高手 张绍文大佬 写的 11 | I/O优化(下):如何监控线上I/O操作,里面说到检测的方式采用Native的hook,没有采用java的hook,是因为无法监控到native代码,性能极差,甚至由于采用java hook 要对应的做兼容处理,所以相比之下采用native hook,监测文件的操作函数,比如open,read,write,close通过hook这些函数我们可以拿到对应的信息,比如hook open函数,我们可以拿到操作的文件名,fd,文件的原始大小等,hook read,write可以得到对应的读写次数,读写总大小,使用buffer大小,读写总耗时等,而对于要检测的内容包括下面几种
1.主线程的Io操作
2.读写Buff过小
3.重复读
4.资源泄漏
读写Buff过小检测的原因
其他检测的点,估计大家都觉得理所当然,这里解释下为啥要检测Buff过小的原因,我们知道,对于文件系统是以block为单位读写,对于磁盘是以page 为单位读写,看起来即使我们在应用程序上面使用
很小的Buffer,在底层应该差别不大,那是不是这样呢?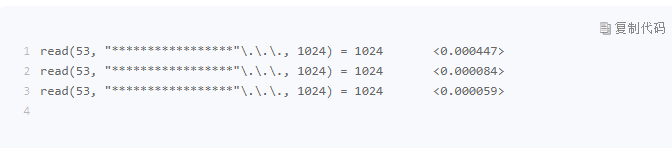
虽然后面俩次系统调用的时间的确会少一些,但是也会有一定的耗时,如果我们的Buffer太小,会导致多次无用的系统调用和内存拷贝,导致read/write的次数增多,从而影响性能,那多大的Buff Size
合适呢,一般为4KB,在实际应用中,ObjectOutputStream 就是一个很好的例子,ObjectOutputStream使用的buff size非常小,如果我们使用BufferInputStream或者ByteArrayOutputStream后整体的性能,会有非常明显的提升,下面是检测的结果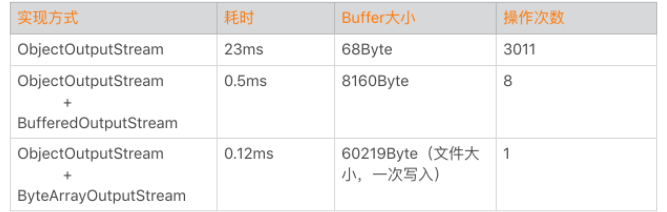
所以检测读写Buff过小是非常重要的
使用
在Io Canary页面中包含了下面的检测条目,也验证了我们前面说的要检测的条目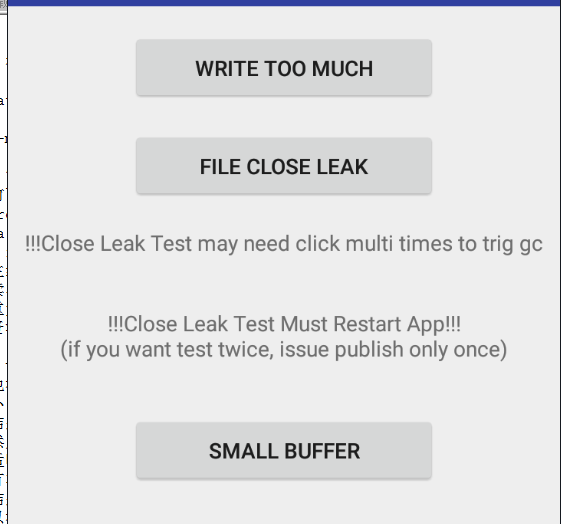
源码分析
Plugin plugin = Matrix.with().getPluginByClass(IOCanaryPlugin.class);
if (!plugin.isPluginStarted()) {
MatrixLog.i(TAG, "plugin-io start");
plugin.start();
}
public class IOCanaryPlugin extends Plugin {
private static final String TAG = "Matrix.IOCanaryPlugin";
private final IOConfig mIOConfig;
private IOCanaryCore mCore;
...
@Override
public void init(Application app, PluginListener listener) {
super.init(app, listener);
IOCanaryUtil.setPackageName(app);
mCore = new IOCanaryCore(this);
}
@Override
public void start() {
super.start();
mCore.start();
}
...
}
在init的时候会创建一个 IOCanaryCore的对象,接着在start的时候会调用 IOCanaryCore 中对应的start 函数
public class IOCanaryCore implements OnJniIssuePublishListener, IssuePublisher.OnIssueDetectListener {
...
//标识是否启动
private boolean mIsStart;
private CloseGuardHooker mCloseGuardHooker;
/**
* 开始检测
*/
public void start() {
//初始化操作
initDetectorsAndHookers(mIOConfig);
//标识资源已经启动
synchronized (this) {
mIsStart = true;
}
}
/**
* 初始化操作
* @param ioConfig
*/
private void initDetectorsAndHookers(IOConfig ioConfig) {
assert ioConfig != null;
//是否检测 主线程的IO
if (ioConfig.isDetectFileIOInMainThread()
|| ioConfig.isDetectFileIOBufferTooSmall()//是否检测Buff 过小
|| ioConfig.isDetectFileIORepeatReadSameFile()) {//是否检测重复读的情况
//执行JNI 的hook
IOCanaryJniBridge.install(ioConfig, this);
}
//if only detect io closeable leak use CloseGuardHooker is Better 是否检测 资源泄漏的情况 ,默认为true
if (ioConfig.isDetectIOClosableLeak()) {
//Hook CloseGuide 接受到 StrideMode 的结果
mCloseGuardHooker = new CloseGuardHooker(this);
mCloseGuardHooker.hook();
}
}
}
private static final boolean DEFAULT_DETECT_MIAN_THREAD_FILE_IO = true;
private static final boolean DEFAULT_DETECT_SMALL_BUFFER = true;
private static final boolean DEFAULT_DETECT_REPEAT_READ_SAME_FILE = true;
private static final boolean DEFAULT_DETECT_CLOSABLE_LEAK = true;
public boolean isDetectFileIOInMainThread() {
return mDynamicConfig.get(IDynamicConfig.ExptEnum.clicfg_matrix_io_file_io_main_thread_enable.name(), DEFAULT_DETECT_MIAN_THREAD_FILE_IO);
}
public boolean isDetectFileIORepeatReadSameFile() {
return mDynamicConfig.get(IDynamicConfig.ExptEnum.clicfg_matrix_io_repeated_read_enable.name(), DEFAULT_DETECT_REPEAT_READ_SAME_FILE);
}
public boolean isDetectFileIOBufferTooSmall() {
return mDynamicConfig.get(IDynamicConfig.ExptEnum.clicfg_matrix_io_small_buffer_enable.name(), DEFAULT_DETECT_SMALL_BUFFER);
}
public boolean isDetectIOClosableLeak() {
return mDynamicConfig.get(IDynamicConfig.ExptEnum.clicfg_matrix_io_closeable_leak_enable.name(), DEFAULT_DETECT_CLOSABLE_LEAK);
}
所以会执行 IOCanaryJniBridge.install(ioConfig, this);
public class IOCanaryJniBridge {
...
public static void install(IOConfig config, OnJniIssuePublishListener listener) {
...
//load lib 加载so
if (!loadJni()) {
MatrixLog.e(TAG, "install loadJni failed");
return;
}
//set listener 到了这里就说明加载so 成功,JNI 也初始化成功
sOnIssuePublishListener = listener;
try {
//set config
if (config != null) {
//如果当前要检测 主线程的 IO操作
if (config.isDetectFileIOInMainThread()) {
//告知JNI 层监测 主线程的Io情况
enableDetector(DetectorType.MAIN_THREAD_IO);
// ms to μs 也即是 主线程的Io 连续读写 不能低于500毫秒 ,防止将主线程的Io 都收集起来
setConfig(ConfigKey.MAIN_THREAD_THRESHOLD, config.getFileMainThreadTriggerThreshold() * 1000L);
}
//如果要检测 读写Buff过小的操作
if (config.isDetectFileIOBufferTooSmall()) {
//告知 JNI 检测 Buff 过小的情况
enableDetector(DetectorType.SMALL_BUFFER);
//告知 检测 Buff 过小的限制,这里是限制为 4k
setConfig(ConfigKey.SMALL_BUFFER_THRESHOLD, config.getFileBufferSmallThreshold());
}
//如果要检测 重复读 的操作
if (config.isDetectFileIORepeatReadSameFile()) {
//告知JNI 检测 重复读的情况
enableDetector(DetectorType.REPEAT_READ);
//告知检测 重复读的次数,这里是5次
setConfig(ConfigKey.REPEAT_READ_THRESHOLD, config.getFileRepeatReadThreshold());
}
}
//hook 执行 hook
doHook();
//标识执行成功
sIsTryInstall = true;
} catch (Error e) {
MatrixLog.printErrStackTrace(TAG, e, "call jni method error");
}
}
...
/**
* 加载 so
* @return
*/
private static boolean loadJni() {
if (sIsLoadJniLib) {
return true;
}
//加载so ,就会调用 JNI_ONLOAD
try {
System.loadLibrary("io-canary");
} catch (Exception e) {
MatrixLog.e(TAG, "hook: e: %s", e.getLocalizedMessage());
sIsLoadJniLib = false;
return false;
}
//标识加载so 成功
sIsLoadJniLib = true;
return true;
}
...
}
首先执行loadJni()函数,就会执行 System.loadLibrary("io-canary"); 就会调用到 ,io_canary_jni.cc 中的 JNI_OnLoad()函数,这个会由 System.loadLibrary时候掉用
/**
* 加载 so的时候 触发的时机
* @param vm
* @param reserved
* @return
*/
JNIEXPORT jint JNICALL JNI_OnLoad(JavaVM *vm, void *reserved){
__android_log_print(ANDROID_LOG_DEBUG, kTag, "JNI_OnLoad");
kInitSuc = false;
//初始化环境, 找到 Java 相关的类
if (!InitJniEnv(vm)) {
return -1;
}
//首先构建一个IOCanary对象,然后设置 OnIssuePublish 函数指针对象
iocanary::IOCanary::Get().SetIssuedCallback(OnIssuePublish);
//标识初始化成功
kInitSuc = true;
__android_log_print(ANDROID_LOG_DEBUG, kTag, "JNI_OnLoad done");
return JNI_VERSION_1_6;
}
/*
* 初始化环境,找到对应的java 类
*/
static bool InitJniEnv(JavaVM *vm) {
kJvm = vm;
JNIEnv* env = NULL;
if (kJvm->GetEnv((void**)&env, JNI_VERSION_1_6) != JNI_OK){
__android_log_print(ANDROID_LOG_ERROR, kTag, "InitJniEnv GetEnv !JNI_OK");
return false;
}
jclass temp_cls = env->FindClass("com/tencent/matrix/iocanary/core/IOCanaryJniBridge");
if (temp_cls == NULL) {
__android_log_print(ANDROID_LOG_ERROR, kTag, "InitJniEnv kJavaBridgeClass NULL");
return false;
}
//构建成全局变量,因为要多线程中使用
kJavaBridgeClass = reinterpret_cast<jclass>(env->NewGlobalRef(temp_cls));
....
//获取到ArrayList 的构造函数,含有add 函数
jclass list_cls = env->FindClass("java/util/ArrayList");
kListClass = reinterpret_cast<jclass>(env->NewGlobalRef(list_cls));
kMethodIDListConstruct = env->GetMethodID(list_cls, "<init>", "()V");
kMethodIDListAdd = env->GetMethodID(list_cls, "add", "(Ljava/lang/Object;)Z");
return true;
}
接着调用 iocanary::IOCanary::Get().SetIssuedCallback(OnIssuePublish);
首先看iocanary::IOCanary 的类声明
class IOCanary {
public:
//不允许构造函数的拷贝,以即是单例的形式
IOCanary(const IOCanary&) = delete;
IOCanary& operator=(IOCanary const&) = delete;
//提供get 函数,获取具体的对象
static IOCanary& Get();
void RegisterDetector(DetectorType type);
void SetConfig(IOCanaryConfigKey key, long val);
void SetJavaMainThreadId(long main_thread_id);
void SetIssuedCallback(OnPublishIssueCallback issued_callback);
...
private:
//单例
IOCanary();
~IOCanary();
...
}
可以看出这个类是一个单例的形式,他的实现为
IOCanary& IOCanary::Get() {
//构建一个 IOCanary 对象 ,这里为 静态的,也即是第一次的时候才会执行初始化
static IOCanary kInstance;
return kInstance;
}
//默认的构造函数
IOCanary::IOCanary() {
//创建一个线程, 线程执行的时候会执行 IOCanary::Detect 回调函数
std::thread detect_thread(&IOCanary::Detect, this);
//detach是用来和线程对象分离的,这样线程可以独立地执行,
detect_thread.detach();
}
在构建函数执行的时候,会创建一个线程,这样线程执行的时候就会执行 IOCanary::Detect 函数指针
/**
* 子线程中执行
*/
void IOCanary::Detect() {
std::vector<Issue> published_issues;
std::shared_ptr<IOInfo> file_io_info;
//无线循环
while (true) {
published_issues.clear();
//返回值如果为 0 代表从 queue 队列中取出了第一个元素,取出的内容放到了 file_io_info 中
int ret = TakeFileIOInfo(file_io_info);
if (ret != 0) {
break;
}
//执行检测,这里面包括 主线程的Io 检测, Buff 过小的检测,重复读的检测,将结果保存到 published_issues 中
for (auto detector : detectors_) {
detector->Detect(env_, *file_io_info, published_issues);
}
//将结果分发出去
if (issued_callback_ && !published_issues.empty()) {
issued_callback_(published_issues);
}
file_io_info = nullptr;
}
}
先看 TakeFileIOInfo() 函数,这个函数就是判断queue_队列是否为空,如果不为空则取出里面的元素,如果为空,则处于阻塞的状态,这里由于是刚运行为空,处于阻塞的状态
int IOCanary::TakeFileIOInfo(std::shared_ptr<IOInfo> &file_io_info) {
//加锁 更加灵活的锁管理类模板,构造时是否加锁是可选的,在对象析构时如果持有锁会自动释放锁,所有权可以转移。对象生命期内允许手动加锁和释放锁。
std::unique_lock<std::mutex> lock(queue_mutex_);
//如果这个队列为空,则当前线程等待
while (queue_.empty()) {
queue_cv_.wait(lock);
//如果当前要退出的状态,返回-1
if (exit_) {
return -1;
}
}
//到了这里就说明队列不为空,取出第一个 返回
file_io_info = queue_.front();
queue_.pop_front();
return 0;
}
继续回到 iocanary::IOCanary::Get().SetIssuedCallback(OnIssuePublish);
/**
* 传递回调
* @param issued_callback
*/
void IOCanary::SetIssuedCallback(OnPublishIssueCallback issued_callback) {
issued_callback_ = issued_callback;
}
这里是设置一个结果的函数指针,
/**
* 回调函数,用来接受IO 处理的结果,这边接受到之后,再将结果传回Java层
* @param published_issues
*/
void OnIssuePublish(const std::vector<Issue>& published_issues) {
if (!kInitSuc) {
__android_log_print(ANDROID_LOG_ERROR, kTag, "OnIssuePublish kInitSuc false");
return;
}
//由于涉及到子线程,所以要先Attach 才能正确的获取到Env对象
JNIEnv* env;
bool attached;
jint j_ret = kJvm->GetEnv((void**)&env, JNI_VERSION_1_6);
if (j_ret == JNI_EDETACHED) {
jint jAttachRet = kJvm->AttachCurrentThread(&env, nullptr);
if (jAttachRet != JNI_OK) {
__android_log_print(ANDROID_LOG_ERROR, kTag, "onIssuePublish AttachCurrentThread !JNI_OK");
return;
} else {
attached = true;
}
} else if (j_ret != JNI_OK || env == NULL) {
return;
}
//检查是否有异常发生,如果有抛出异常
jthrowable exp = env->ExceptionOccurred();
if (exp != NULL) {
__android_log_print(ANDROID_LOG_INFO, kTag, "checkCanCallbackToJava ExceptionOccurred, return false");
env->ExceptionDescribe();
return;
}
//下面就是返回结果了
jobject j_issues = env->NewObject(kListClass, kMethodIDListConstruct);
...
//调用Java层的 onIssurePublish 函数
env->CallStaticVoidMethod(kJavaBridgeClass, kMethodIDOnIssuePublish, j_issues);
env->DeleteLocalRef(j_issues);
if (attached) {
kJvm->DetachCurrentThread();
}
}
也就是设置一个结果的中转函数指针,然后在这个函数指针中再将结果回调到java层,这样JNI_OnLoad函数执行完毕,继续回到java层 中的
public static void install(IOConfig config, OnJniIssuePublishListener listener) {
...
//如果当前要检测 主线程的 IO操作
if (config.isDetectFileIOInMainThread()) {
//告知JNI 层监测 主线程的Io情况
enableDetector(DetectorType.MAIN_THREAD_IO);
// ms to μs 也即是 主线程的Io 连续读写 不能低于500毫秒 ,防止将主线程的Io 都收集起来
setConfig(ConfigKey.MAIN_THREAD_THRESHOLD, config.getFileMainThreadTriggerThreshold() * 1000L);
}
//如果要检测 读写Buff过小的操作
if (config.isDetectFileIOBufferTooSmall()) {
//告知 JNI 检测 Buff 过小的情况
enableDetector(DetectorType.SMALL_BUFFER);
//告知 检测 Buff 过小的限制,这里是限制为 4k
setConfig(ConfigKey.SMALL_BUFFER_THRESHOLD, config.getFileBufferSmallThreshold());
}
//如果要检测 重复读 的操作
if (config.isDetectFileIORepeatReadSameFile()) {
//告知JNI 检测 重复读的情况
enableDetector(DetectorType.REPEAT_READ);
//告知检测 重复读的次数,这里是5次
setConfig(ConfigKey.REPEAT_READ_THRESHOLD, config.getFileRepeatReadThreshold());
}
...
}
根据当前配置要检测的内容,调用 enableDetector(DetectorType.MAIN_THREAD_IO); 告知JNI要检测的内容
//Java 层调用 告知 JNI 层要检测的内容
JNIEXPORT void JNICALL
Java_com_tencent_matrix_iocanary_core_IOCanaryJniBridge_enableDetector(JNIEnv *env, jclass type, jint detector_type) {
iocanary::IOCanary::Get().RegisterDetector(DetectorType(detector_type));
}
/**
* 注册
* @param type
*/
void IOCanary::RegisterDetector(DetectorType type) {
switch (type) {
case DetectorType::kDetectorMainThreadIO:
// 检测主线程的 Io 操作
detectors_.push_back(new FileIOMainThreadDetector());
break;
case DetectorType::kDetectorSmallBuffer:
//检测 Buff 过小的操作
detectors_.push_back(new FileIOSmallBufferDetector());
break;
case DetectorType::kDetectorRepeatRead:
//检测 重复读的 情况
detectors_.push_back(new FileIORepeatReadDetector());
break;
default:
break;
}
}
这里的 detector 的定义是这样的
//集合,用来存储当前要检测的种类
std::vector<FileIODetector*> detectors_; 也即是根据java层要检测的内容,响应的在JNI层中创建对应的对象,然后添加到 detectors_ 集合中
接着java层调用
// ms to μs 也即是 主线程的Io 连续读写 不能低于500毫秒 ,防止将主线程的Io 都收集起来
setConfig(ConfigKey.MAIN_THREAD_THRESHOLD, config.getFileMainThreadTriggerThreshold() * 1000L);
相应的调用到JNI层的实现为
//Java 层调用 告知 JNI 层要检测的标准
JNIEXPORT void JNICALL
Java_com_tencent_matrix_iocanary_core_IOCanaryJniBridge_setConfig(JNIEnv *env, jclass type, jint key, jlong val) {
iocanary::IOCanary::Get().SetConfig(IOCanaryConfigKey(key), val);
}
//传递要检测的标准,存储到env 中
void IOCanary::SetConfig(IOCanaryConfigKey key, long val) {
env_.SetConfig(key, val);
}
这里的env 为 IOCanary 中的一个成员
//这里会构建一个 IOCanaryEnv 对象
IOCanaryEnv env_;
//默认构造函数的执行
IOCanaryEnv::IOCanaryEnv() {
//添加默认的检测标准
configs_[IOCanaryConfigKey::kMainThreadThreshold] = kDefaultMainThreadTriggerThreshold;
configs_[IOCanaryConfigKey::kSmallBufferThreshold] = kDefaultBufferSmallThreshold;
configs_[IOCanaryConfigKey::kRepeatReadThreshold] = kDefaultRepeatReadThreshold;
}
其中configs_的定义为
//声明一个数组,用来存储检测的标准
long configs_[IOCanaryConfigKey::kConfigKeysLen];
//保存动态设置的标准
void IOCanaryEnv::SetConfig(IOCanaryConfigKey key, long val) {
if (key >= IOCanaryConfigKey::kConfigKeysLen) {
return;
}
configs_[key] = val;
}
也即是会将java层的检测标准保存到 这个数组中,这些检测标准中分别为 主线程的Io操作500毫秒,Buff过小的标准为4KB,重复读写的标准为5次
接着java层调用
//hook 执行 hook
doHook();
对应到JNI层的实现为
//Java 层调用, Hook 对应的so
JNIEXPORT jboolean JNICALL
Java_com_tencent_matrix_iocanary_core_IOCanaryJniBridge_doHook(JNIEnv *env, jclass type) {
__android_log_print(ANDROID_LOG_INFO, kTag, "doHook");
//分别Hook "libopenjdkjvm.so","libjavacore.so","libopenjdk.so"
for (int i = 0; i < TARGET_MODULE_COUNT; ++i) {
const char* so_name = TARGET_MODULES[i];
__android_log_print(ANDROID_LOG_INFO, kTag, "try to hook function in %s.", so_name);
//采用elf 打开这个so
loaded_soinfo* soinfo = elfhook_open(so_name);
if (!soinfo) {
__android_log_print(ANDROID_LOG_WARN, kTag, "Failure to open %s, try next.", so_name);
continue;
}
//然后hook 原本so 中 open, open64 函数,替换成 ProxyOpen ,ProxyOpen64 ,同时将 原本要hook的函数指针接受过来,方便后面调用系统原本的方法
elfhook_replace(soinfo, "open", (void*)ProxyOpen, (void**)&original_open);
elfhook_replace(soinfo, "open64", (void*)ProxyOpen64, (void**)&original_open64);
//判断当前so 是否为 libjavacore.so
bool is_libjavacore = (strstr(so_name, "libjavacore.so") != nullptr);
if (is_libjavacore) {
//如果当前so 为 libjavacore.so hook read 函数
if (!elfhook_replace(soinfo, "read", (void*)ProxyRead, (void**)&original_read)) {
__android_log_print(ANDROID_LOG_WARN, kTag, "doHook hook read failed, try __read_chk");
//如果 hook libjavacore.so 中的 read 函数失败之后, 尝试的hook __read_chk 函数
//这是由于不同版本的 Android 系统实现有所不同,在Android 7.0之后,我们还需要替换下面这三个方法 open64,__read_chk,__write_chk
if (!elfhook_replace(soinfo, "__read_chk", (void*)ProxyRead, (void**)&original_read)) {
__android_log_print(ANDROID_LOG_WARN, kTag, "doHook hook failed: __read_chk");
return false;
}
}
//hook write 函数
if (!elfhook_replace(soinfo, "write", (void*)ProxyWrite, (void**)&original_write)) {
__android_log_print(ANDROID_LOG_WARN, kTag, "doHook hook write failed, try __write_chk");
//如果 hook libjavacore.so 中的 write 函数失败之后,尝试的 hook __write_chk 函数
if (!elfhook_replace(soinfo, "__write_chk", (void*)ProxyWrite, (void**)&original_write)) {
__android_log_print(ANDROID_LOG_WARN, kTag, "doHook hook failed: __write_chk");
return false;
}
}
}
//hook so 中的close 函数
elfhook_replace(soinfo, "close", (void*)ProxyClose, (void**)&original_close);
//关闭soinfo
elfhook_close(soinfo);
}
return true;
}
可以看出来 分别Hook "libopenjdkjvm.so","libjavacore.so","libopenjdk.so" 然后 hook 对应的open,close,read,write,在Android 7.0之后,
我们还需要替换下面这三个方法 open64,__read_chk,__write_chk ,同时我们将原本的函数指针保存下来,毕竟真正的逻辑实现还得交给系统的方法来实现,所以要将原本的函数纸指针保存下来
现在来总结下 当前所做的操作 java层加载了so函数,之后在JNI层执行了一系列的初始化,将当前java层要检测的选项,已经检查的标准传递到了JNI层,JNI层根据要检测的内容,创建对应的
FileIODetector 类来对应的检测,同时 IOCanary 启动了一个线程在等待结果,当前没有结果处于阻塞的状态
现在来看看打开一个文件的时候会做什么操作
由于我们hook了系统的open函数,所以当调用open的时候会执行到这个方法
/**
* Proxy for open: callback to the java layer open 函数的代理方法
*/
//todo astrozhou 解决非主线程打开,主线程操作问题
int ProxyOpen(const char *pathname, int flags, mode_t mode) {
//如果当前不是主线程,直接执行原本的系统的函数
if(!IsMainThread()) {
return original_open(pathname, flags, mode);
}
//执行系统原本的open函数,返回值为打开的文件描述符
int ret = original_open(pathname, flags, mode);
//如果返回的文件描述符为 -1 代表打开失败
if (ret != -1) {
DoProxyOpenLogic(pathname, flags, mode, ret);
}
return ret;
}
可以看到还是调用系统的open函数来执行文件的打开操作,注意这个open函数得到是linux 的文件操作符,接着调用DoProxyOpenLogic()函数进行信息的收集操作
/**
* 监控到了系统的open函数之后,收集信息 ,只有在open的时候才会
* @param pathname 当前打开的文件路径
* @param flags
* @param mode 当前打开的文件模式
* @param ret 当前打开的文件描述符
*/
static void DoProxyOpenLogic(const char *pathname, int flags, mode_t mode, int ret) {
//获取到env
JNIEnv* env = NULL;
kJvm->GetEnv((void**)&env, JNI_VERSION_1_6);
//如果env 获取为空,或者还没有初始化成功
if (env == NULL || !kInitSuc) {
__android_log_print(ANDROID_LOG_ERROR, kTag, "ProxyOpen env null or kInitSuc:%d", kInitSuc);
} else {
//执行 IOCanaryJniBridge 中的 getJavaContext 函数 ,获取到 JavaContext 对象
jobject java_context_obj = env->CallStaticObjectMethod(kJavaBridgeClass, kMethodIDGetJavaContext);
if (NULL == java_context_obj) {
return;
}
//获取到JavaContext 中的 stack 字段,这个字段保存了当前的 堆栈信息
jstring j_stack = (jstring) env->GetObjectField(java_context_obj, kFieldIDStack);
//获取到 JavaContext 中的 threadName 字段,这个字段 标识了当前线程名
jstring j_thread_name = (jstring) env->GetObjectField(java_context_obj, kFieldIDThreadName);
//转成c的字符串
char* thread_name = jstringToChars(env, j_thread_name);
char* stack = jstringToChars(env, j_stack);
//然后构建一个JavaContext 对象
JavaContext java_context(GetCurrentThreadId(), thread_name == NULL ? "" : thread_name, stack == NULL ? "" : stack);
free(stack);
free(thread_name);
//调用IOCanary 中的 onOpen函数 ,通知当前执行了open函数了 ret为打开的结果
iocanary::IOCanary::Get().OnOpen(pathname, flags, mode, ret, java_context);
//释放局部对象
env->DeleteLocalRef(java_context_obj);
env->DeleteLocalRef(j_stack);
env->DeleteLocalRef(j_thread_name);
}
}
在这个函数中利用JNI调用java层的 IOCanaryJniBridge 中的 getJavaContext 函数 ,获取到 JavaContext 对象,接着得到了这个对象宏的stack,threadName字段的值,现在看看这个对象
/**
* 声明为private,给c++部分调用!!!不要干掉!!!
* @return
*/
private static JavaContext getJavaContext() {
try {
return new JavaContext();
} catch (Throwable th) {
MatrixLog.printErrStackTrace(TAG, th, "get javacontext exception");
}
return null;
}
private static final class JavaContext {
private final String stack;
private final String threadName;
private JavaContext() {
//stack 为当前的堆栈信息,这里调用getThrowableStack 将这个堆栈信息变成一个字符串的形势,这里就不往下看了
stack = IOCanaryUtil.getThrowableStack(new Throwable());
//为当前的线程名
threadName = Thread.currentThread().getName();
}
}
接着在JNI层构建一个 JavaContext对象,保存当前java的堆栈信息,线程名
class JavaContext {
public:
JavaContext(intmax_t thread_id , const std::string& thread_name, const std::string& stack)
: thread_id_(thread_id), thread_name_(thread_name), stack_(stack) {
}
//当前的线程id
const intmax_t thread_id_;
//线程明
const std::string thread_name_;
//当前堆栈信息
const std::string stack_;
};
最后调用 iocanary::IOCanary::Get().OnOpen(pathname, flags, mode, ret, java_context);
void IOCanary::OnOpen(const char *pathname, int flags, mode_t mode, int open_ret, const JavaContext& java_context) {
collector_.OnOpen(pathname, flags, mode, open_ret, java_context);
}
这里的collector_对象为 IOCanary 中的一个成员
//这里会构建一个 IOInfoCollector 对象,这个对象用来收集Io的信息,并且IOInfoCollector 中有一个Map集合用来存储当前的IO信息,当打开一个文件的时候就会添加到这个map中
IOInfoCollector collector_;
// A singleton to collect and generate operation info
class IOInfoCollector {
public:
void OnOpen(const char *pathname, int flags, mode_t mode, int open_ret, const JavaContext& java_context);
void OnRead(int fd, const void *buf, size_t size, ssize_t read_ret, long read_cost);
void OnWrite(int fd, const void *buf, size_t size, ssize_t write_ret, long write_cost);
std::shared_ptr<IOInfo> OnClose(int fd, int close_ret);
private:
...
//存储了 Io 收集信息的集合 ,key 为打开的文件描述符
std::unordered_map<int, std::shared_ptr<IOInfo>> info_map_;
};
当调用到 collector_.OnOpen()函数的时候就会执行到
/**
* 收集系统执行open 函数之后的内容
* @param pathname
* @param flags
* @param mode
* @param open_ret 打开文件之后返回的文件描述符
* @param java_context
*/
void IOInfoCollector::OnOpen(const char *pathname, int flags, mode_t mode
, int open_ret, const JavaContext& java_context) {
//__android_log_print(ANDROID_LOG_DEBUG, kTag, "OnOpen fd:%d; path:%s", open_ret, pathname);
//首先当前的文件描述符要为合法
if (open_ret == -1) {
return;
}
//根据当前的文件描述符从map 中查找,如果 满足了 info_map_.find(open_ret) != info_map_.end() 那说明当前的文件描述符已经在这个map中了,直接返回
if (info_map_.find(open_ret) != info_map_.end()) {
//__android_log_print(ANDROID_LOG_WARN, kTag, "OnOpen fd:%d already in info_map_", open_ret);
return;
}
//到这里,说明map中不存在当前的文件描述符,那么构建一个 IOInfo 对象,添加到 map 集合中
std::shared_ptr<IOInfo> info = std::make_shared<IOInfo>(pathname, java_context);
info_map_.insert(std::make_pair(open_ret, info));
}
也即是会根据当前的文件描述符在这个集合中查找是否存在,如果不存在就封装成一个IOInfo 对象,然后保存到这个集合中,接下来看看 IOInfo 对象,这是收集当前文件描述符对应的IO信息的重要类
//rw short for read/write operation
class IOInfo {
public:
IOInfo() = default;
IOInfo(const std::string path, const JavaContext java_context)
: start_time_μs_(GetSysTimeMicros()),op_type_(kInit)
, path_(path), java_context_(java_context) {
}
//当前打开的文件路径
const std::string path_;
//当前对应的Java 堆栈信息
const JavaContext java_context_;
//当前的时间
int64_t start_time_μs_;
//类型,默认是初始化
FileOpType op_type_ = kInit;
//读写的次数
int op_cnt_ = 0;
//当前读写 buff 的最大值
long buffer_size_ = 0;
//读写的大小
long op_size_ = 0;
//读写发费的时间
long rw_cost_μs_ = 0;
//最大继续读的时间
long max_continual_rw_cost_time_μs_ = 0;
//统计读写 单次花费时间的最大值
long max_once_rw_cost_time_μs_ = 0;
//当前继续读的时间
long current_continual_rw_time_μs_ = 0;
//上一次读写的时间
int64_t last_rw_time_μs_ = 0;
//当前文件的大小
long file_size_ = 0;
//总共花费的时间,也即是打开到关闭的时间
long total_cost_μs_ = 0;
};
从IOInfo构造函数中可以知道当执行了open()函数,添加到info_map_ 集合中的时候,就为 start_time_μs_ 赋值了当前的时间,标识IO操作的开始时间
到这里总结下打开文件发生的事情,首先利用系统原本的open函数进行文件的打开操作,得到对应的文件描述符,当文件描述符正确的时候,利用JNI得到java层对应的JavaContext对象,这个对象
包含了对应java层的堆栈信息,已经线程名,接着将这些信息保存到 info_map_集合中
现在来看看读,写文件的时候发生了什么
ssize_t ProxyRead(int fd, void *buf, size_t size) {
//如果当前不是主线程,直接执行原本的系统的函数
if(!IsMainThread()) {
return original_read(fd, buf, size);
}
//获取到当前的时间
int64_t start = GetTickCountMicros();
//调用系统原本的read 函数读取 ,ret 为读取的大小,也即是真实的读取大小,size 为buff的大小
size_t ret = original_read(fd, buf, size);
//得到系统读取发费了多少时间
long read_cost_μs = GetTickCountMicros() - start;
//__android_log_print(ANDROID_LOG_DEBUG, kTag, "ProxyRead fd:%d buf:%p size:%d ret:%d cost:%d", fd, buf, size, ret, read_cost_μs);
//统计当前读取的情况
iocanary::IOCanary::Get().OnRead(fd, buf, size, ret, read_cost_μs);
return ret;
}
可以看到首先是调用系统原本的read函数进行文件读操作,在调用读函数之前记录下当前的时间,然后读取完毕之后,就能得到读取花费的时间,系统的read的返回值为系统真正读取的大小,接着调用
iocanary::IOCanary::Get().OnRead(fd, buf, size, ret, read_cost_μs);
/**
* 通知 系统执行了 read 函数了,这里要将这些信息收集起来
* @param fd 当前的文件描述符
* @param buf
* @param size buff的大小
* @param read_ret 真正读取的大小
* @param read_cost 读取花费的时间
*/
void IOCanary::OnRead(int fd, const void *buf, size_t size, ssize_t read_ret, long read_cost) {
collector_.OnRead(fd, buf, size, read_ret, read_cost);
}
void IOInfoCollector::OnRead(int fd, const void *buf, size_t size, ssize_t read_ret, long read_cost) {
//检查参数是否合法
if (read_ret == -1 || read_cost < 0) {
return;
}
//根据当前的文件文件描述符从map 中查找 ,如果 满足 info_map_.find(fd) == info_map_.end() 说明 当前文件描述符不在map集合中,说明是非法的
if (info_map_.find(fd) == info_map_.end()) {
//__android_log_print(ANDROID_LOG_DEBUG, kTag, "OnRead fd:%d not in info_map_", fd);
return;
}
//收集当前读写的信息
CountRWInfo(fd, FileOpType::kRead, size, read_cost);
}
在看CountRWInfo 函数之前,先看写的操作,因为这俩个函数最终都是调用这个函数完成信息的收集操作
ssize_t ProxyWrite(int fd, const void *buf, size_t size) {
//如果当前不是主线程,直接执行原本的系统的函数
if(!IsMainThread()) {
return original_write(fd, buf, size);
}
//获取到当前的时间
int64_t start = GetTickCountMicros();
//调用系统原本的write 函数写 ,ret 为真正的写的大小,也即是真实的读取大小,size 为buff的大小
size_t ret = original_write(fd, buf, size);
//得到系统写发费了多少时间
long write_cost_μs = GetTickCountMicros() - start;
//__android_log_print(ANDROID_LOG_DEBUG, kTag, "ProxyWrite fd:%d buf:%p size:%d ret:%d cost:%d", fd, buf, size, ret, write_cost_μs);
//统计当前读取的情况
iocanary::IOCanary::Get().OnWrite(fd, buf, size, ret, write_cost_μs);
return ret;
}
逻辑跟读是差不多的,在真正调用系统的写函数之前记录下当前的时间,之后再调用系统的write函数,结束之后我们就能得到调用write函数消耗的时间,接着调用
iocanary::IOCanary::Get().OnWrite(fd, buf, size, ret, write_cost_μs);
void IOCanary::OnWrite(int fd, const void *buf, size_t size, ssize_t write_ret, long write_cost) {
collector_.OnWrite(fd, buf, size, write_ret, write_cost);
}
void IOInfoCollector::OnWrite(int fd, const void *buf, size_t size, ssize_t write_ret, long write_cost) {
//检查参数是否合法
if (write_ret == -1 || write_cost < 0) {
return;
}
//根据当前的文件文件描述符从map 中查找 ,如果 满足 info_map_.find(fd) == info_map_.end() 说明 当前文件描述符不在map集合中,说明是非法的
if (info_map_.find(fd) == info_map_.end()) {
//__android_log_print(ANDROID_LOG_DEBUG, kTag, "OnWrite fd:%d not in info_map_", fd);
return;
}
//收集当前读写的信息
CountRWInfo(fd, FileOpType::kWrite, size, write_cost);
}
看到这里读跟写的操作都是一样的,最终都会调用到 CountRWInfo(fd, FileOpType::kWrite, size, write_cost); 完成信息的收集操作
/**
* 收集当前读写的信息
* @param fd
* @param fileOpType
* @param op_size
* @param rw_cost
*/
void IOInfoCollector::CountRWInfo(int fd, const FileOpType &fileOpType, long op_size, long rw_cost) {
//确保当前打开的文件描述符在 map中
if (info_map_.find(fd) == info_map_.end()) {
return;
}
//当前的时间
const int64_t now = GetSysTimeMicros();
//次数加一
info_map_[fd]->op_cnt_ ++;
//读写的buff大小累加
info_map_[fd]->op_size_ += op_size;
//读写花费的时间累加
info_map_[fd]->rw_cost_μs_ += rw_cost;
//更新单次读写 时间的最大值
if (rw_cost > info_map_[fd]->max_once_rw_cost_time_μs_) {
info_map_[fd]->max_once_rw_cost_time_μs_ = rw_cost;
}
//判断当前的时间跟上一次读写的时间差,是否 大于 8毫秒 ,也即是 16毫秒的一半(一帧刷新的时间)
if (info_map_[fd]->last_rw_time_μs_ > 0 && (now - info_map_[fd]->last_rw_time_μs_) < kContinualThreshold) {
//如果小于,累加
info_map_[fd]->current_continual_rw_time_μs_ += rw_cost;
} else {
//如果大于,替换掉
info_map_[fd]->current_continual_rw_time_μs_ = rw_cost;
}
//赋值最大的读写时间
if (info_map_[fd]->current_continual_rw_time_μs_ > info_map_[fd]->max_continual_rw_cost_time_μs_) {
info_map_[fd]->max_continual_rw_cost_time_μs_ = info_map_[fd]->current_continual_rw_time_μs_;
}
//赋值上一次的读写的时间
info_map_[fd]->last_rw_time_μs_ = now;
//如果当前的buff_size 小于 当前读的大小,赋值操作
if (info_map_[fd]->buffer_size_ < op_size) {
info_map_[fd]->buffer_size_ = op_size;
}
//辅助当前的type
if (info_map_[fd]->op_type_ == FileOpType::kInit) {
info_map_[fd]->op_type_ = fileOpType;
}
}
这里会统计很多的信息,比如读写的次数,读写的总时间,读写buff的总大小,单次读写时间的最大值,单次读写buff的最大值等
现在来看看读,关闭文件的时候发生了什么
/**
* Proxy for close: callback to the java layer 系统 close 函数的代理方法
*/
int ProxyClose(int fd) {
//如果当前不是主线程,直接执行原本的系统的函数
if(!IsMainThread()) {
return original_close(fd);
}
//调用系统的close 函数,ret 代表关闭的结果
int ret = original_close(fd);
//__android_log_print(ANDROID_LOG_DEBUG, kTag, "ProxyClose fd:%d ret:%d", fd, ret);
//收集当前关闭的信息
iocanary::IOCanary::Get().OnClose(fd, ret);
return ret;
}
调用系统原本的close函数执行真正的文件关闭操作,最后在关闭的时候,调用 iocanary::IOCanary::Get().OnClose(fd, ret);
/**
* 通知 系统执行了 close 函数了,这里要将这些信息收集起来
* @param fd 当前要关闭的文件描述符
* @param close_ret 关闭之后的结果
*/
void IOCanary::OnClose(int fd, int close_ret) {
//收集信息,更新打开文件的时间, 文件的大小,并从集合中移除出去
std::shared_ptr<IOInfo> info = collector_.OnClose(fd, close_ret);
if (info == nullptr) {
return;
}
//将当前的io信息提交
OfferFileIOInfo(info);
}
collector_.OnClose(fd, close_ret); 函数的实现
/**
* 收集系统执行close 函数之后的内容
* @param fd
* @param close_ret
* @return
*/
std::shared_ptr<IOInfo> IOInfoCollector::OnClose(int fd, int close_ret) {
//根据当前的文件文件描述符从map 中查找 ,如果 满足 info_map_.find(fd) == info_map_.end() 说明 当前文件描述符不在map集合中,说明是非法的
if (info_map_.find(fd) == info_map_.end()) {
//__android_log_print(ANDROID_LOG_DEBUG, kTag, "OnClose fd:%d not in info_map_", fd);
return nullptr;
}
//文件从打开到关闭的时间
info_map_[fd]->total_cost_μs_ = GetSysTimeMicros() - info_map_[fd]->start_time_μs_;
//当前文件的大小
info_map_[fd]->file_size_ = GetFileSize(info_map_[fd]->path_.c_str());
//从集合中找到对应的对象,然后从这个集合中移除出去,返回这个对象
std::shared_ptr<IOInfo> info = info_map_[fd];
info_map_.erase(fd);
return info;
}
接着调用OfferFileIOInfo(info)函数提交了这次文件操作的结果
/**
* 将当前的io 信息添加到
* @param file_io_info
*/
void IOCanary::OfferFileIOInfo(std::shared_ptr<IOInfo> file_io_info) {
//加锁
std::unique_lock<std::mutex> lock(queue_mutex_);
//添加到集合中
queue_.push_back(file_io_info);
//唤醒等待的函数
queue_cv_.notify_one();
//释放锁
lock.unlock();
}
这里做的操作就是将当前的文件操作对应的信息从集合 info_map_中取出来,因为当前执行了关闭的操作,所以对于当前这个文件来说可以分析当前的IO信息了,所以从集合中移除,然后添加到
queue_ 队列中,接着调用了 queue_cv_.notify_one(); 这样我们前面等待的线程就不会阻塞了,继续回到 IOCanary::Detect() 函数
/**
* 子线程中执行
*/
void IOCanary::Detect() {
std::vector<Issue> published_issues;
std::shared_ptr<IOInfo> file_io_info;
//无线循环
while (true) {
published_issues.clear();
//返回值如果为 0 代表从 queue 队列中取出了第一个元素,取出的内容放到了 file_io_info 中
int ret = TakeFileIOInfo(file_io_info);
if (ret != 0) {
break;
}
//执行检测,这里面包括 主线程的Io 检测, Buff 过小的检测,重复读的检测,将结果保存到 published_issues 中
for (auto detector : detectors_) {
detector->Detect(env_, *file_io_info, published_issues);
}
//将结果分发出去
if (issued_callback_ && !published_issues.empty()) {
issued_callback_(published_issues);
}
file_io_info = nullptr;
}
}
继续分析 TakeFileIOInfo()函数,因为前面在文件关闭的时候,往这个队列中添加了内容,所以这里就不会为空,就能返回这个元素了
int IOCanary::TakeFileIOInfo(std::shared_ptr<IOInfo> &file_io_info) {
//加锁 更加灵活的锁管理类模板,构造时是否加锁是可选的,在对象析构时如果持有锁会自动释放锁,所有权可以转移。对象生命期内允许手动加锁和释放锁。
std::unique_lock<std::mutex> lock(queue_mutex_);
//如果这个队列为空,则当前线程等待
while (queue_.empty()) {
queue_cv_.wait(lock);
//如果当前要退出的状态,返回-1
if (exit_) {
return -1;
}
}
//到了这里就说明队列不为空,取出第一个 返回
file_io_info = queue_.front();
queue_.pop_front();
return 0;
}
接着执行
//执行检测,这里面包括 主线程的Io 检测, Buff 过小的检测,重复读的检测,将结果保存到 published_issues 中
for (auto detector : detectors_) {
detector->Detect(env_, *file_io_info, published_issues);
}
主线程的Io 检测
/**
* 主线程 Io的检测
* @param env
* @param file_io_info
* @param issues
*/
void FileIOMainThreadDetector::Detect(const IOCanaryEnv &env, const IOInfo &file_io_info,std::vector<Issue>& issues) {
//判断当前是否为主线程
if (GetMainThreadId() == file_io_info.java_context_.thread_id_) {
int type = 0;
//当前文件描述符中最大的连续读写时间 大于 13毫秒
if (file_io_info.max_continual_rw_cost_time_μs_ > IOCanaryEnv::kPossibleNegativeThreshold) {
type = 1;
}
//根据当前的 主线程的检测标准,读要大于500毫秒
if(file_io_info.max_continual_rw_cost_time_μs_ > env.GetMainThreadThreshold()) {
type |= 2;
}
if (type != 0) {
//构建一个 Issue
Issue issue(kType, file_io_info);
issue.repeat_read_cnt_ = type; //use repeat to record type
//将issure 添加到 issues中
PublishIssue(issue, issues);
}
}
}
可以看到首先判断 当前的线程是否为主线程,判断的依据为 GetMainThreadId() == file_io_info.java_context_.thread_id_,这个thread_id_ 辅助的时机为当执行open函数的时候,创建JavaContext
JavaContext java_context(GetCurrentThreadId(), thread_name == NULL ? "" : thread_name, stack == NULL ? "" : stack);赋值的,也即是通过gettid()获取到当前的线程id
/**
* 获取到当前线程的id
* @return
*/
intmax_t GetCurrentThreadId() {
return gettid();
}
而对于GetMainThreadId() 我们可以直接通过getpid()获取到当前进程的id,所以如果当前进程的id跟线程id一样的化,那就说明为主线程
/**
* 获取主线程的id
* @return
*/
intmax_t GetMainThreadId() {
static intmax_t pid = getpid();
return pid;
}
接着判断当前Io操作的时间是否大于500毫秒,如果都满足的化,构建一个Issue 对象,然后通过 PublishIssue(issue, issues);
/**
* 将target 添加到 issues 集合中
* @param target
* @param issues
*/
void FileIODetector::PublishIssue(const Issue &target, std::vector<Issue>& issues) {
//如果当前的key 在 published_issue_set_ 中,代表之前已经发送过了,直接返回
if (IsIssuePublished(target.key_)) {
return;
}
//添加到 issures 集合中
issues.push_back(target);
//将当前的key 添加到 published_issue_set_ 中,代表这个key 已经发送过
MarkIssuePublished(target.key_);
}
//添加key 到 published_issue_set_ 代表当前的key 已经发送过
void FileIODetector::MarkIssuePublished(const std::string &key) {
published_issue_set_.insert(key);
}
//判断当前的key 是否在 published_issue_set_集合中能否找到,如果满足 published_issue_set_.find(key) != published_issue_set_.end() 说明在集合中,返回true
bool FileIODetector::IsIssuePublished(const std::string &key) {
return published_issue_set_.find(key) != published_issue_set_.end();
}
//用来存储已经发送过
std::set<std::string> published_issue_set_;
可以看到这里检测符合主线程Io检测的条件就通过构建一个Issue 对象,然后添加到 issues 中,这个集合为我们前面传递进去的
Buff过小的 检测
/**
* 判断 是否 Buff 过小
* @param env
* @param file_io_info
* @param issues
*/
void FileIOSmallBufferDetector::Detect(const IOCanaryEnv &env, const IOInfo &file_io_info,std::vector<Issue>& issues) {
//读写的次数大于 20次 , 平均 每次 Buff 的 大小小于 Buff过小的标识, 并且最大继续读的时间大于 14毫秒
if (file_io_info.op_cnt_ > env.kSmallBufferOpTimesThreshold && (file_io_info.op_size_ / file_io_info.op_cnt_) < env.GetSmallBufferThreshold()
&& file_io_info.max_continual_rw_cost_time_μs_ >= env.kPossibleNegativeThreshold) {
//发布Buff过小的结论
PublishIssue(Issue(kType, file_io_info), issues);
}
}
可以看到检测重复读的条件为 重写的次数要达到20次,平均每场Buff的大小不应该小于检测标准,当满足了之后,通过PublishIssue(Issue(kType, file_io_info), issues);保存到issues 集合中
重复读的 检测
void FileIORepeatReadDetector::Detect(const IOCanaryEnv &env,
const IOInfo &file_io_info,
std::vector<Issue>& issues) {
//当前操作的文件路径
const std::string& path = file_io_info.path_;
//如果满足observing_map_.find(path) == observing_map_.end() 说明 这个path 没有在这个集合中,则添加到这个集合中
if (observing_map_.find(path) == observing_map_.end()) {
//如果最大连续读写的时间小于13毫秒 直接返回
if (file_io_info.max_continual_rw_cost_time_μs_ < env.kPossibleNegativeThreshold) {
return;
}
//添加到集合中
observing_map_.insert(std::make_pair(path, std::vector<RepeatReadInfo>()));
}
//根据path 取出 对应的 RepeatReadInfo 集合
std::vector<RepeatReadInfo>& repeat_infos = observing_map_[path];
//如果当前的类型为写的 ,直接返回
if (file_io_info.op_type_ == FileOpType::kWrite) {
repeat_infos.clear();
return;
}
//到了这里就说明当前为都读的情况 ,构建一个RepeatReadInfo 对象
RepeatReadInfo repeat_read_info(file_io_info.path_, file_io_info.java_context_.stack_, file_io_info.java_context_.thread_id_,
file_io_info.op_size_, file_io_info.file_size_);
//如果当前repeat_infos 集合的大小小于0 ,将当前的 repeat_read_info 添加到集合中,直接返回
if (repeat_infos.size() == 0) {
repeat_infos.push_back(repeat_read_info);
return;
}
//repeat_infos 集合大小不等于0,查看最后一个元素的时间跟当前的时间比 如果大于 17毫秒的化,那清空 repeat_infos 集合
if((GetTickCount() - repeat_infos[repeat_infos.size() - 1].op_timems) > 17) { //17ms todo astrozhou add to params
repeat_infos.clear();
}
//最先添加元素的时间跟当前的时间差小于17毫秒
//标识是否从repeat_infos 集合中找到 repeat_read_info
bool found = false;
int repeatCnt;
for (auto& info : repeat_infos) {
if (info == repeat_read_info) {
//标识找到了
found = true;
//增加重复读的次数
info.IncRepeatReadCount();
//得到当前重复读的次数
repeatCnt = info.GetRepeatReadCount();
break;
}
}
//如果没有找到,repeat_infos 集合中添加 repeat_read_info
if (!found) {
repeat_infos.push_back(repeat_read_info);
return;
}
//检查重复读的次数是否达到了设置的重复读的次数
if (repeatCnt >= env.GetRepeatReadThreshold()) {
//如果达到了,构建一个Issure,添加到queue 中
Issue issue(kType, file_io_info);
issue.repeat_read_cnt_ = repeatCnt;
issue.stack = repeat_read_info.GetStack();
PublishIssue(issue, issues);
}
}
检测的标准为重复读写的次数达到了5次,之后会通过构建一个Issue 对象,然后添加到issues 集合中
结果的分发
void IOCanary::Detect() {
std::vector<Issue> published_issues;
std::shared_ptr<IOInfo> file_io_info;
//无线循环
while (true) {
published_issues.clear();
//返回值如果为 0 代表从 queue 队列中取出了第一个元素,取出的内容放到了 file_io_info 中
int ret = TakeFileIOInfo(file_io_info);
if (ret != 0) {
break;
}
//执行检测,这里面包括 主线程的Io 检测, Buff 过小的检测,重复读的检测,将结果保存到 published_issues 中
for (auto detector : detectors_) {
detector->Detect(env_, *file_io_info, published_issues);
}
//将结果分发出去
if (issued_callback_ && !published_issues.empty()) {
issued_callback_(published_issues);
}
file_io_info = nullptr;
}
}
当检测完了之后,执行 issued_callback_(published_issues); 将结果传递出去,这个issued_callback_ 为我们在初始化的时候调用下面的函数传递进来的,所以会执行对应的函数
//首先构建一个IOCanary对象,然后设置 OnIssuePublish 函数指针对象
iocanary::IOCanary::Get().SetIssuedCallback(OnIssuePublish);
/**
* 回调函数,用来接受IO 处理的结果,这边接受到之后,再将结果传回Java层
* @param published_issues
*/
void OnIssuePublish(const std::vector<Issue>& published_issues) {
...
//由于涉及到子线程,所以要先Attach 才能正确的获取到Env对象
JNIEnv* env;
bool attached;
jint j_ret = kJvm->GetEnv((void**)&env, JNI_VERSION_1_6);
if (j_ret == JNI_EDETACHED) {
jint jAttachRet = kJvm->AttachCurrentThread(&env, nullptr);
if (jAttachRet != JNI_OK) {
__android_log_print(ANDROID_LOG_ERROR, kTag, "onIssuePublish AttachCurrentThread !JNI_OK");
return;
} else {
attached = true;
}
} else if (j_ret != JNI_OK || env == NULL) {
return;
}
//检查是否有异常发生,如果有抛出异常
jthrowable exp = env->ExceptionOccurred();
if (exp != NULL) {
__android_log_print(ANDROID_LOG_INFO, kTag, "checkCanCallbackToJava ExceptionOccurred, return false");
env->ExceptionDescribe();
return;
}
//下面就是返回结果了
jobject j_issues = env->NewObject(kListClass, kMethodIDListConstruct);
//遍历当前要分析 published_issues
for (const auto& issue : published_issues) {
//类型
jint type = issue.type_;
//文件名
jstring path = env->NewStringUTF(issue.file_io_info_.path_.c_str());
//文件的大小
jlong file_size = issue.file_io_info_.file_size_;
//读写的次数
jint op_cnt = issue.file_io_info_.op_cnt_;
//当前读写buff的最大值
jlong buffer_size = issue.file_io_info_.buffer_size_;
//花费的时间
jlong op_cost_time = issue.file_io_info_.rw_cost_μs_/1000;
//当前的类型
jint op_type = issue.file_io_info_.op_type_;
//总的buff 大小
jlong op_size = issue.file_io_info_.op_size_;
//线程名
jstring thread_name = env->NewStringUTF(issue.file_io_info_.java_context_.thread_name_.c_str());
//java的堆栈信息
jstring stack = env->NewStringUTF(issue.stack.c_str());
//重复的次数
jint repeat_read_cnt = issue.repeat_read_cnt_;
//构建一个Java 层的 Issure对象
jobject issue_obj = env->NewObject(kIssueClass, kMethodIDIssueConstruct, type, path, file_size, op_cnt, buffer_size,
op_cost_time, op_type, op_size, thread_name, stack, repeat_read_cnt);
//调用ArrayList 的add 函数
env->CallBooleanMethod(j_issues, kMethodIDListAdd, issue_obj);
env->DeleteLocalRef(issue_obj);
env->DeleteLocalRef(stack);
env->DeleteLocalRef(thread_name);
env->DeleteLocalRef(path);
}
//调用Java层的 onIssurePublish 函数
env->CallStaticVoidMethod(kJavaBridgeClass, kMethodIDOnIssuePublish, j_issues);
env->DeleteLocalRef(j_issues);
if (attached) {
kJvm->DetachCurrentThread();
}
}
最终会调用到 IOCanaryJniBridge 中的 onIssuePublish 函数 ,这样就将结果转回到了java层,这里不往下看
/**
* JNI方法调用
* @param issues
*/
public static void onIssuePublish(ArrayList<IOIssue> issues) {
if (sOnIssuePublishListener == null) {
return;
}
sOnIssuePublishListener.onIssuePublish(issues);
}
资源泄漏的检测
这里先收下对应资源的检测,Android 本身是有严苛模式的。开启这个模式之后会帮我们检测,具体的类为StrictMode,关于使用 StrictMode 可以网上查看对应的内容
public class IOCanaryCore implements OnJniIssuePublishListener, IssuePublisher.OnIssueDetectListener {
...
private void initDetectorsAndHookers(IOConfig ioConfig) {
...
//if only detect io closeable leak use CloseGuardHooker is Better 是否检测 资源泄漏的情况 ,默认为true
if (ioConfig.isDetectIOClosableLeak()) {
//Hook CloseGuide 接受到 StrideMode 的结果
mCloseGuardHooker = new CloseGuardHooker(this);
mCloseGuardHooker.hook();
}
}
...
}
public final class CloseGuardHooker {
...
public CloseGuardHooker(IssuePublisher.OnIssueDetectListener issueListener) {
this.issueListener = issueListener;
}
/**
* set to true when a certain thread try hook once; even failed.
*/
public void hook() {
MatrixLog.i(TAG, "hook sIsTryHook=%b", mIsTryHook);
if (!mIsTryHook) {
boolean hookRet = tryHook();
MatrixLog.i(TAG, "hook hookRet=%b", hookRet);
//标识hook成功
mIsTryHook = true;
}
}
...
}
private boolean tryHook() {
try {
Class<?> closeGuardCls = Class.forName("dalvik.system.CloseGuard");
Class<?> closeGuardReporterCls = Class.forName("dalvik.system.CloseGuard$Reporter");
//得到字段 REPORTER
Field fieldREPORTER = closeGuardCls.getDeclaredField("REPORTER");
//得到字段 ENABLED
Field fieldENABLED = closeGuardCls.getDeclaredField("ENABLED");
fieldREPORTER.setAccessible(true);
fieldENABLED.setAccessible(true);
sOriginalReporter = fieldREPORTER.get(null);
//将Enable 字段改为true
fieldENABLED.set(null, true);
// open matrix close guard also
MatrixCloseGuard.setEnabled(true);
ClassLoader classLoader = closeGuardReporterCls.getClassLoader();
if (classLoader == null) {
return false;
}
//将CloseGuard 字段中的 REPORTER 代理为我们的 IOCloseLeakDetector ,这样我们就能收到这个结果
fieldREPORTER.set(null, Proxy.newProxyInstance(classLoader,
new Class<?>[]{closeGuardReporterCls},
new IOCloseLeakDetector(issueListener, sOriginalReporter)));
fieldREPORTER.setAccessible(false);
return true;
} catch (Throwable e) {
MatrixLog.e(TAG, "tryHook exp=%s", e);
}
return false;
}
具体的思路为利用反射,把CloseGuard 中的ENABLED 值设为true,利用动态代理,把REPORTER替换成我们定义的proxy,这里先大致讲下严苛模式的检查流程,下面是基本的使用
StrictMode.setThreadPolicy(new StrictMode.ThreadPolicy.Builder()
.detectDiskReads()
.detectDiskWrites()
.detectNetwork() // or .detectAll() for all detectable problems
.penaltyLog()
.build());
可以看出我们通过构建了一个ThreadPolicy ,调用setThreadPolicy函数传递到了StrictMode 中
public static void setThreadPolicy(final ThreadPolicy policy) {
setThreadPolicyMask(policy.mask);
}
private static void setThreadPolicyMask(final int policyMask) {
...
setBlockGuardPolicy(policyMask);
Binder.setThreadStrictModePolicy(policyMask);
}
// Sets the policy in Dalvik/libcore (BlockGuard)
private static void setBlockGuardPolicy(final int policyMask) {
if (policyMask == 0) {
BlockGuard.setThreadPolicy(BlockGuard.LAX_POLICY);
return;
}
final BlockGuard.Policy policy = BlockGuard.getThreadPolicy();
final AndroidBlockGuardPolicy androidPolicy;
if (policy instanceof AndroidBlockGuardPolicy) {
androidPolicy = (AndroidBlockGuardPolicy) policy;
} else {
androidPolicy = threadAndroidPolicy.get();
BlockGuard.setThreadPolicy(androidPolicy);
}
androidPolicy.setPolicyMask(policyMask);
}
首先获取到 BlockGuard 中的 Policy 对应的函数实现为
public static Policy getThreadPolicy() {
return threadPolicy.get();
}
private static ThreadLocal<Policy> threadPolicy = new ThreadLocal<Policy>() {
@Override protected Policy initialValue() {
return LAX_POLICY;
}
};
public static final Policy LAX_POLICY = new Policy() {
public void onWriteToDisk() {}
public void onReadFromDisk() {}
public void onNetwork() {}
public int getPolicyMask() {
return 0;
}
};
所以这里获取到的 LAX_POLICY 不是 AndroidBlockGuardPolicy的实现,所以会走androidPolicy = threadAndroidPolicy.get();,而threadAndroidPolicy 定义为
private static final ThreadLocal<AndroidBlockGuardPolicy> threadAndroidPolicy = new ThreadLocal<AndroidBlockGuardPolicy>() {
@Override
protected AndroidBlockGuardPolicy initialValue() {
return new AndroidBlockGuardPolicy(0);
}
};
上面的逻辑就是会设置一个AndroidBlockGuardPolicy 到 BlockGuard.setThreadPolicy(androidPolicy);中,现在设置进来了那么看看系统是怎么使用的,比如我们的BlockGuardOs,
这是文件操作的基本类,这里就看open函数
@Override public FileDescriptor open(String path, int flags, int mode) throws ErrnoException {
BlockGuard.getThreadPolicy().onReadFromDisk();
if ((mode & O_ACCMODE) != O_RDONLY) {
BlockGuard.getThreadPolicy().onWriteToDisk();
}
return os.open(path, flags, mode);
}
在open函数中有这样的调用 BlockGuard.getThreadPolicy().onReadFromDisk();,由于前面我们设置了policy 为 AndroidBlockGuardPolicy 所以会执行对应的函数
public void onReadFromDisk() {
if ((mPolicyMask & DETECT_DISK_READ) == 0) {
return;
}
if (tooManyViolationsThisLoop()) {
return;
}
BlockGuard.BlockGuardPolicyException e = new StrictModeDiskReadViolation(mPolicyMask);
e.fillInStackTrace();
startHandlingViolationException(e);
}
在startHandlingViolationException()进行分析,如果出现了问题,就会在这个函数的内部调用handleViolation(v),然后通过IPC的机制调用到ActivityManagerService中的
handleApplicationStrictModeViolation()函数,在这个方法的内部会通过handler将 警告的弹窗显示出来
synchronized (this) {
final long origId = Binder.clearCallingIdentity();
Message msg = Message.obtain();
msg.what = SHOW_STRICT_MODE_VIOLATION_UI_MSG;
HashMap<String, Object> data = new HashMap<String, Object>();
data.put("result", result);
data.put("app", r);
data.put("violationMask", violationMask);
data.put("info", info);
msg.obj = data;
mUiHandler.sendMessage(msg);
Binder.restoreCallingIdentity(origId);
}
那他是怎么样将结果告诉我们的呢 ,为什么要hook CloseGuard 的成员呢,发现CloseGuard 中有这样的函数,感觉像是回调结果的的样子,接下来我们在源码中全局搜索
public void warnIfOpen() {
if (allocationSite == null || !ENABLED) {
return;
}
String message =
("A resource was acquired at attached stack trace but never released. "
+ "See java.io.Closeable for information on avoiding resource leaks.");
REPORTER.report(message, allocationSite);
}
实现的地方非常多,这里只看一个 比如 ActivityView 中有这样方法
@Override
protected void finalize() throws Throwable {
if (DEBUG) Log.v(TAG, "ActivityContainerWrapper: finalize called");
try {
if (mGuard != null) {
mGuard.warnIfOpen();
release();
}
} finally {
super.finalize();
}
}
mGuard.warnIfOpen(); 由于我们代理了这个REPORT 所以我们可以获取到结果,接下来看看我们hook之后做的处理
public class IOCloseLeakDetector extends IssuePublisher implements InvocationHandler {
private final Object originalReporter;
public IOCloseLeakDetector(OnIssueDetectListener issueListener, Object originalReporter) {
super(issueListener);
this.originalReporter = originalReporter;
}
@Override
public Object invoke(Object proxy, Method method, Object[] args) throws Throwable {
MatrixLog.i(TAG, "invoke method: %s", method.getName());
if (method.getName().equals("report")) {
if (args.length != 2) {
MatrixLog.e(TAG, "closeGuard report should has 2 params, current: %d", args.length);
return null;
}
if (!(args[1] instanceof Throwable)) {
MatrixLog.e(TAG, "closeGuard report args 1 should be throwable, current: %s", args[1]);
return null;
}
Throwable throwable = (Throwable) args[1];
//获取到当前堆栈信息
String stackKey = IOCanaryUtil.getThrowableStack(throwable);
if (isPublished(stackKey)) {
MatrixLog.d(TAG, "close leak issue already published; key:%s", stackKey);
} else {
//构建一个Issue
Issue ioIssue = new Issue(SharePluginInfo.IssueType.ISSUE_IO_CLOSABLE_LEAK);
ioIssue.setKey(stackKey);
JSONObject content = new JSONObject();
try {
content.put(SharePluginInfo.ISSUE_FILE_STACK, stackKey);
} catch (JSONException e) {
// e.printStackTrace();
MatrixLog.e(TAG, "json content error: %s", e);
}
//执行结果的公布,这样就能获取到泄漏的内容了,还加上了当前堆栈信息
ioIssue.setContent(content);
publishIssue(ioIssue);
MatrixLog.d(TAG, "close leak issue publish, key:%s", stackKey);
markPublished(stackKey);
}
return null;
}
return method.invoke(originalReporter, args);
}
}
总结
通过native hook的方式,hook了系统中 libopenjdkjvm.so,libjavacore.so,libopenjdk.so 中对应的open,open64,read,write,read_chk,write_chk,close函数,通过hook这些函数
我们得到IO操作的信息,比如文件的大小,路径,buff的大小,真正读写内容的大小,单次读写的耗时等
主线程Io的检测,通过在回调执行open函数的时候,获取到java层的堆栈信息,以及当前的线程名,之后在文件关闭的时候,会判断当前的进程id,如果进程的id跟记录下来的线程id一样,说明为主线程
操作Io,然后判断是否满足了主线程操作Io的阈值,这里设置为最小不能小于500毫秒
Buff过小的检测,每次系统回调执行read,write的时候,我们可以知道单次读写的耗时,buff的大小,真正读写的大小,将这些信息收集起来,当文件关闭的时候执行了close函数的时候,将这些结果进行分析
这里的检测标准为 Buff的平均读写大小不应该小于4KB
重复读的检测,这里的标准为 不能小于5次
资源泄漏的检测,通过hook CloseGuard 的REPORT 成员,并且将ENABLED 设置为true,这样我们就能收到严苛模式检测下的结果,我们就能收集当前的java堆栈信息



