简介
什么是UPnp
所谓 UPnP ,就是“通用的即插即用” ,注意是通用的,虽然很容易和 Windows 的即插即用混淆,但这肯定不是微软的专利!现在大部分的路由器都支持这个功能,只是默认情况下没有打开而已(基于安全考虑)。请管理员手动打开这个支持选项。
可以用来干嘛?
如果我们要写 P2P 软件,那就用的着了,电骡不是有所谓的 LowID 和 highID 吗? 为了提高自己的共享能力(我为别人共享,别人也为我共享),我们(软件)要使用公网 IP 地址监听和建立连接,但是我们(软件)不是路由器,如何监听? 只好请路由器帮我们做一个端口映射,然后我们(软件)在内网监听,效果跟在公网上监听一样,也就是所谓 电骡的 HighID 了。 现在越来越多的用户都是内网用户的上网形式(NAT),如网吧。能够把自己的 LowID 提升为 HighID ,那么肯定会有更多的备选数据源啊,这样下载就被加速了!
natp,upnp,nat-pmp区别
natp是内部机器通过路由器也就是网关向外部发送网络请求时,路由器记住内部机器的ip和端口,同时跟真正发送数据的外网端口绑定,产生一个临时映射表,当收到外网数据以后通过这个映射表将数据转发给内部机器。nat的多种映射类型之前说过而 upnp和nat-pmp差不多,就是在路由器和内部机器提供一个中间服务,内部机器请求upnp将其使用到的端口跟某个外网端口绑定,这样当路由器收到外网请求时先去upnp里查找是否此外网端口已经被upnp映射,如果被映射则将数据转发到内部机器对应的端口。
总结
动态NAPT的映射关系是内网数据包来触发的,如果外网有主动进来的数据包,因为查询不到映射关系的存在,就会被丢弃掉。 而 natpmp,upnp 就可以做到 让外网能够直接访问内网,当然这个要你的路由器支持才能添加这个映射的关系,但是目前的情况来看,估计很多路由器都是有支持的
Utorrent Upnp,pmp支持
Utorrent 中就有对Upnp,pmp协议做了支持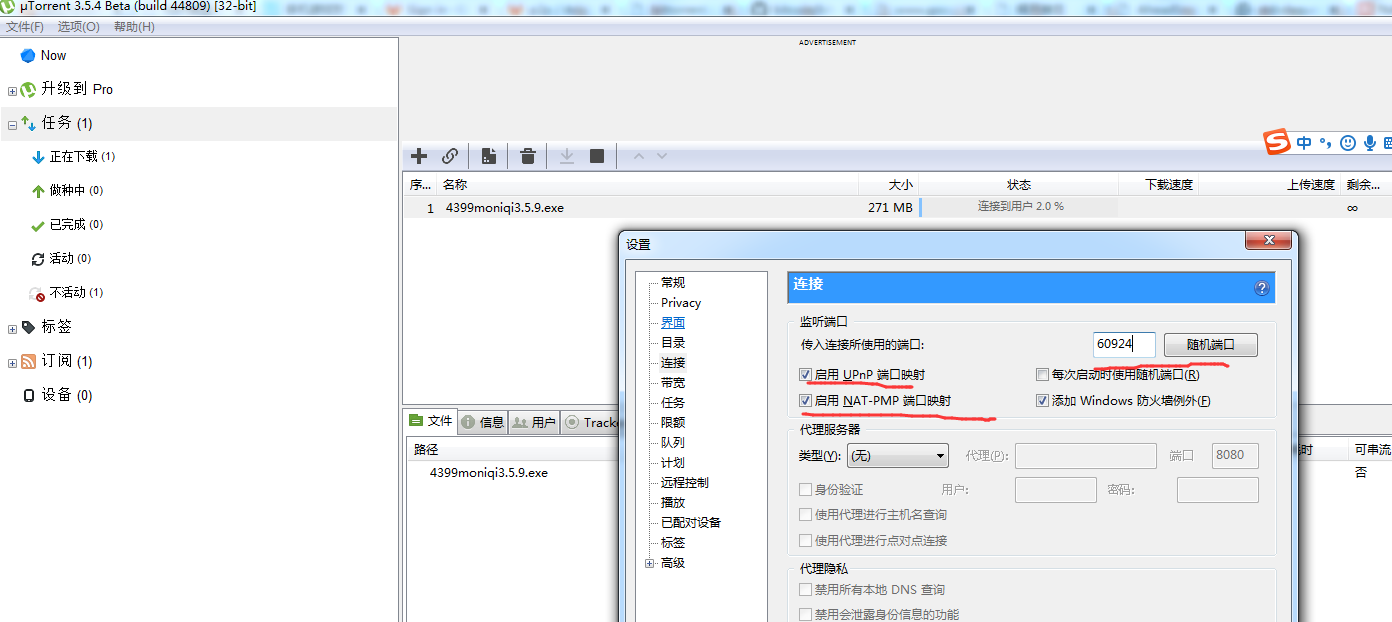
可以看出这里我们指定的端口为60924 ,之后我们可以登录路由器查看是否存在这样的隐射关系 ,具体在系统工具,端口转发这一栏
Upnp 使用
Upnp下载地址为
这里选择一个稳定的版本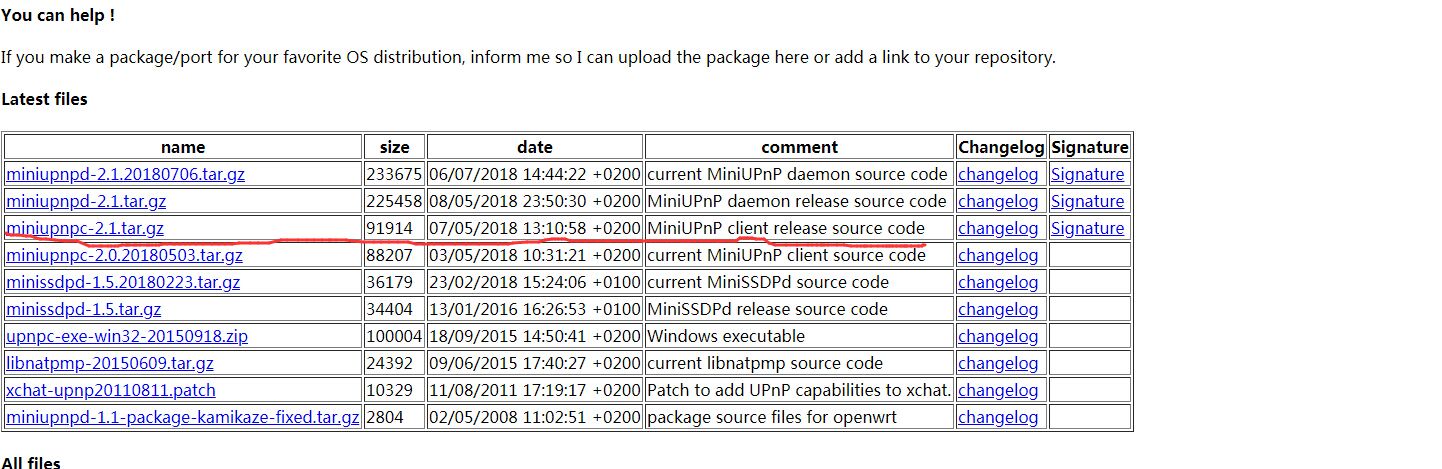
下载完之后,直接进入源码目录,由于本身是含有MakeFile文件的,直接使用make install 既可以编译出来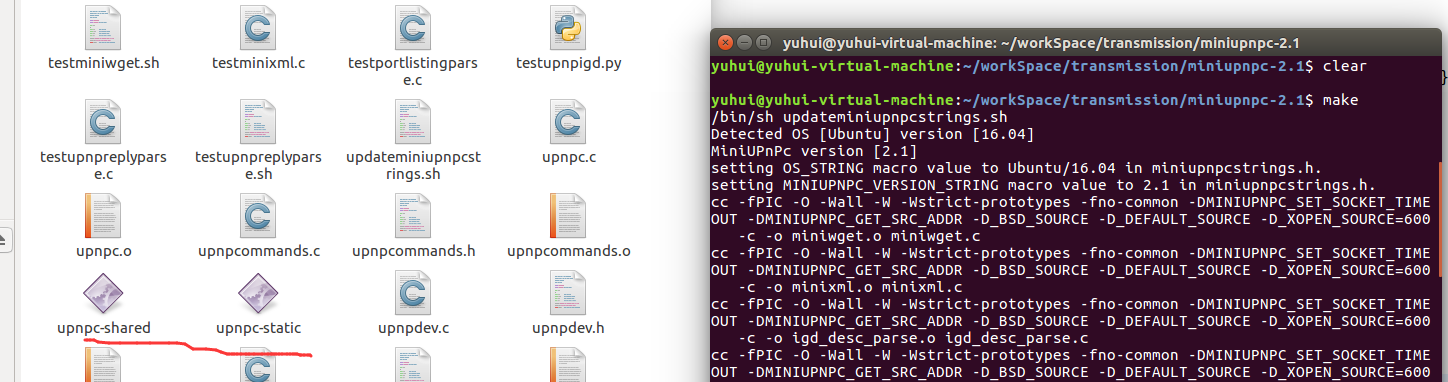
upnp具体的使用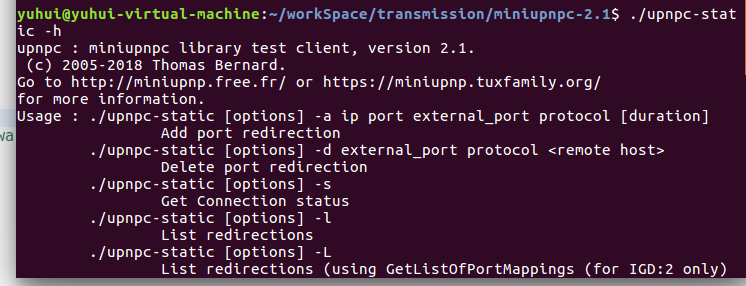
首先填的是你的本地的ip地址,后面是你要映射的本地的端口,后面是要映射的公网的端口,最后一个是协议,这里可以选择TCP,或者UDP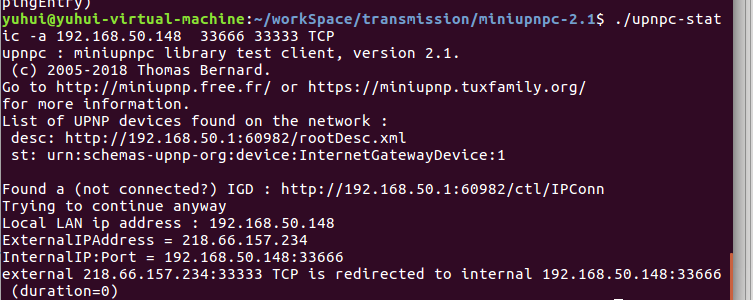
查看路由器
我们也可以使用tcpdump监听我们的本地端口,之后再通过访问我们的外网ip地址跟映射的外网端口号是否有反应 ,注意这里监听是我们的本地的端口
我们可以通过在浏览器中输入 218.66.157.234:33333 ,可以看到监听到了内容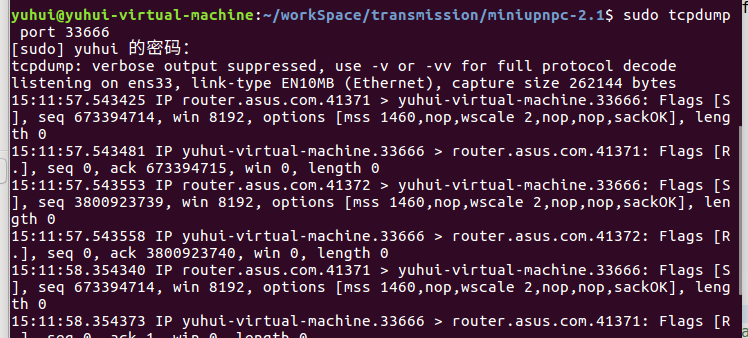
natPmp 使用
nat-pmp 下载地址为
natPmp下载地址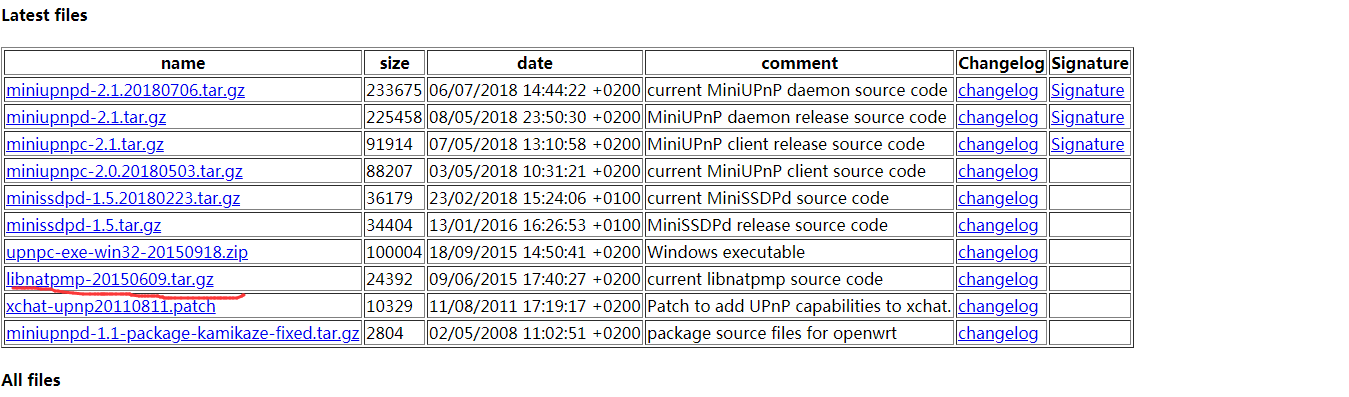
下载完之后,直接进入源码目录,由于本身是含有MakeFile文件的,直接使用make install 既可以编译出来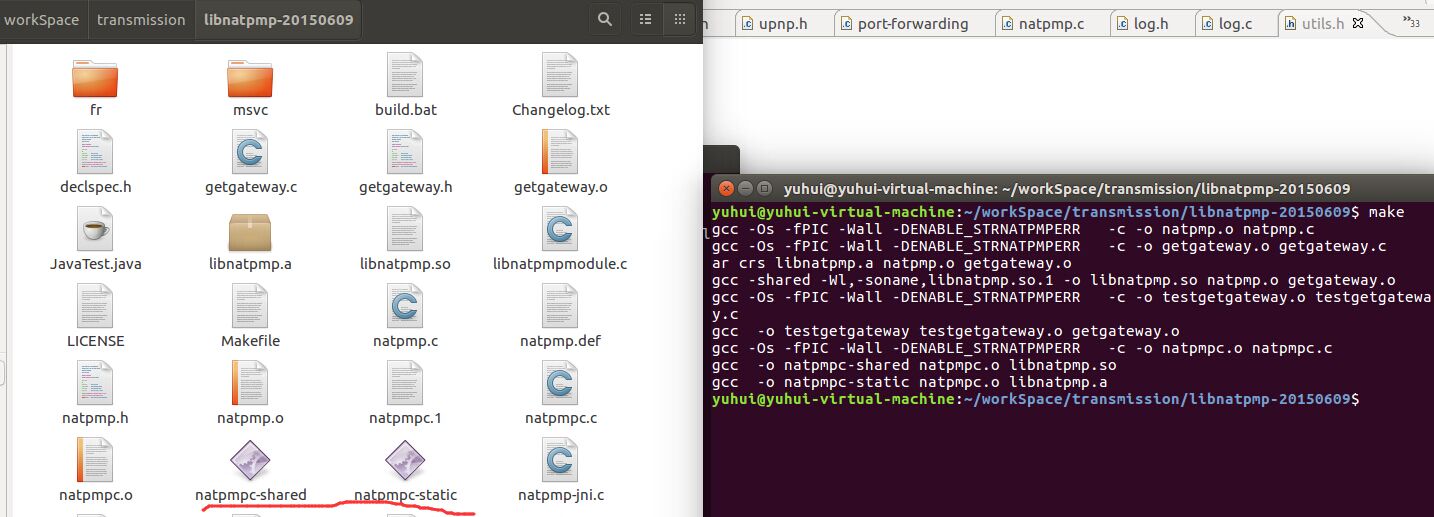
pmp 编译选项支持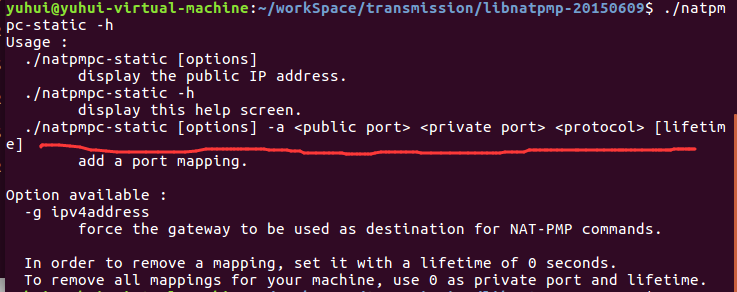
首先你要映射的本地的端口,后面是要映射的公网的端口,最后一个是协议,这里可以选择TCP,或者UDP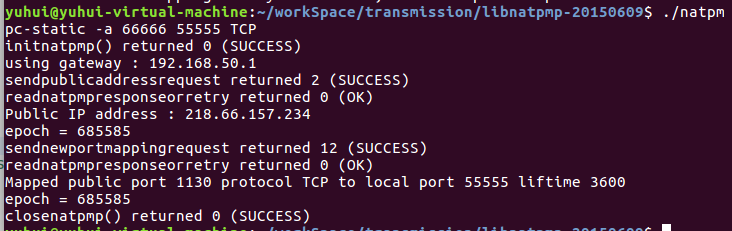
查看路由器
当然我们也可以使用tcpdump监听我们的本地端口,之后再通过访问我们的外网ip地址跟映射的外网端口号是否有反应,注意这里监听是我们的本地的端口
我们可以通过在浏览器中输入 218.66.157.234:1130 ,可以看到监听到了内容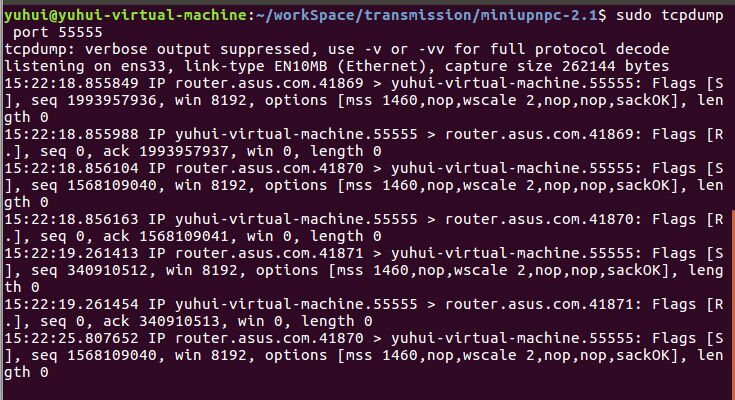
transmission upnp,pmp分析
首先transmission 是有对upnp,pmp协议支持的,所以我们可以分析他的使用,首先要打开端口隐射支持![]()
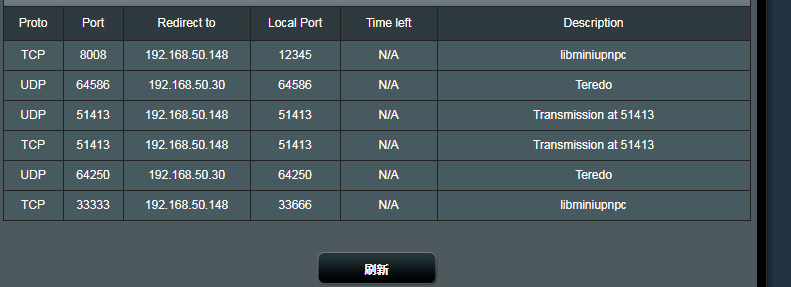
查看路由器,映射的结果为,可以看到这里既有tcp,也有udp![]()
参数选项解析
tr_sessionSetPortForwardingEnabled函数实现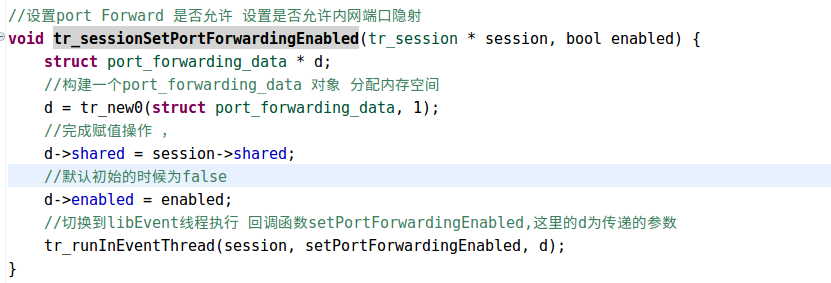
这里的shared是在前面初始化session的时候就执行了初始化,下面是调用的过程
//构建一个tr_shared 对象,赋值默认的成员变量,赋值给session中的shared,这个shared成员保存了upnp,pmp对应的对象
session->shared = tr_sharedInit(session);
/***
**** 分配 tr_shared 内存空间,赋初值
***/
tr_shared *
tr_sharedInit(tr_session * session) {
//分配一块内存空间tr_shared
tr_shared * s = tr_new0(tr_shared, 1);
//赋初值
s->session = session;
//默认是不允许的
s->isEnabled = false;
//开始的状态为 TR_PORT_UNMAPPED 为没有 mapped
s->upnpStatus = TR_PORT_UNMAPPED;
s->natpmpStatus = TR_PORT_UNMAPPED;
..
return s;
}
而tr_shared 结构体定义为
//保存了端口隐射的状态跟对象
struct tr_shared {
//是否可以用
bool isEnabled;
//标识是否正在关闭
bool isShuttingDown;
//标识是否要做端口检查
bool doPortCheck;
// 对应的 pmp 协议状态
tr_port_forwarding natpmpStatus;
// 对应的 upnc 协议状态
tr_port_forwarding upnpStatus;
//对应的 upnp的协议的 对象指针
tr_upnp * upnp;
//对应的 pmp 协议的 对象指针
tr_natpmp * natpmp;
//session引用
tr_session * session;
//定时器对象
struct event * timer;
};
继续回到这个函数
//设置port Forward 是否允许 设置是否允许内网端口隐射
void tr_sessionSetPortForwardingEnabled(tr_session * session, bool enabled) {
struct port_forwarding_data * d;
//构建一个port_forwarding_data 对象 分配内存空间
d = tr_new0(struct port_forwarding_data, 1);
//完成赋值操作 ,
d->shared = session->shared;
//默认初始的时候为false
d->enabled = enabled;
//切换到libEvent线程执行 回调函数setPortForwardingEnabled,这里的d为传递的参数
tr_runInEventThread(session, setPortForwardingEnabled, d);
}
tr_runInEventThread 这个会执行现成的切换,当切换成功之后会执行setPortForwardingEnabled 函数,d为传递的参数
//函数是在libEvent中执行, vdata的类型为 struct port_forwarding_data
static void setPortForwardingEnabled(void * vdata) {
struct port_forwarding_data * data = vdata;
//将data enable值赋值给 shared 的 enable ,如果是为true的话,就创建一个定时器,赋值给shared 中的time成员
tr_sharedTraversalEnable(data->shared, data->enabled);
//释放data内存
tr_free(data);
}
//如果当前isEnable为真,赋值给shared 中的isEnabled成员,而且创建一个定时器,赋值
void tr_sharedTraversalEnable(tr_shared * s, bool isEnabled) {
//如果当前isEnabled为真,完成赋值操作赋值给 isEnabled ,并且开启定时器
if ((s->isEnabled = isEnabled))
{
//开启定时器
start_timer(s);
}
else
{
//如果不可以用停止 端口隐射
stop_forwarding(s);
}
}
//开启定时器
static void start_timer(tr_shared * s) {
//构建一个定时器,同时赋值给timer成员,当定时器触发的时候,会回调执行 onTimer 函数
s->timer = evtimer_new(s->session->event_base, onTimer, s);
//根据tr_shared 状态来设置定时器的时间间隔
set_evtimer_from_status(s);
}
//端口隐射定时器触发函数 ,也即是这个函数会被多次的触发,就看这个定时器设置的时间,而关键点就是在 natPulse
static void onTimer(evutil_socket_t fd UNUSED, short what UNUSED,void * vshared) {
tr_shared * s = vshared;
//参数校验
assert(s);
assert(s->timer);
/* do something */
natPulse(s, s->doPortCheck);
//将doPortCheck置位false
s->doPortCheck = false;
/* set up the timer for the next pulse */
//根据不同的状态决定定时器触发的时间
set_evtimer_from_status(s);
}
static void natPulse(tr_shared * s, bool do_check) {
int oldStatus;
int newStatus;
tr_port public_peer_port;
//获取到局域网的端口,也即是Bt指定的监听端口
const tr_port private_peer_port = s->session->private_peer_port;
//判断是否允许,当前是要允许,并且没有正在关闭
const int is_enabled = s->isEnabled && !s->isShuttingDown;
//如果为空,创建对应的pmp对象
if (s->natpmp == NULL)
{
s->natpmp = tr_natpmpInit();
}
//如果为空,创建对应的upnp 对象
if (s->upnp == NULL)
{
s->upnp = tr_upnpInit();
}
//获取到老的状态
oldStatus = tr_sharedTraversalStatus(s);
//pmp 完成内网的端口隐射, 隐射完成之后, public_peer_port 接受公网的端口
s->natpmpStatus = tr_natpmpPulse(s->natpmp, private_peer_port, is_enabled,&public_peer_port);
//如果pmp 隐射成功
if (s->natpmpStatus == TR_PORT_MAPPED)
{
//session保存pmp 隐射完成之后外网的端口号
s->session->public_peer_port = public_peer_port;
}
//执行 upnp的隐射
s->upnpStatus = tr_upnpPulse(s->upnp, private_peer_port, is_enabled, do_check);
//获取到最新的状态
newStatus = tr_sharedTraversalStatus(s);
//发生状态的变化,打印
if (newStatus != oldStatus)
{
printf("Port Forwarding State changed \n");
}
}
第一次 upnp为空,执行 tr_natpmpInit();
//pmp 协议初始化
struct tr_natpmp*
tr_natpmpInit (void)
{
//分配内存空间
struct tr_natpmp * nat;
nat = tr_new0 (struct tr_natpmp, 1);
//默认的状态为 pmp 发现状态
nat->state = TR_NATPMP_DISCOVER;
nat->public_port = 0;
nat->private_port = 0;
//对应的socket为空
nat->natpmp.s = TR_BAD_SOCKET; /* socket */
return nat;
}
而tr_natpmp 结构体定义为
struct tr_natpmp
{
//标识是否已经发现
bool has_discovered;
//标识是否已经mapped
bool is_mapped;
//隐射完成之后 得到的外网端口号
tr_port public_port;
//隐射的内网端口号
tr_port private_port;
time_t renew_time;
//下一个command 发送的时间
time_t command_time;
//pmp 当前的状态
tr_natpmp_state state;
//真正的pmp 库对象
natpmp_t natpmp;
};
所以初始化,只是分配块内存空间,变为默认值
tr_upnpInit();
/**
*** 初始化操作
**/
tr_upnp*
tr_upnpInit(void) {
tr_upnp * ret = tr_new0(tr_upnp, 1);
ret->state = TR_UPNP_DISCOVER;
ret->port = -1;
return ret;
}
struct tr_upnp {
//标识是否发现
bool hasDiscovered;
struct UPNPUrls urls;
struct IGDdatas data;
int port;
char lanaddr[16];
//标识是否隐射完成
unsigned int isMapped;
//upnp的状态
tr_upnp_state state;
};
所以初始化,只是分配块内存空间,变为默认值
而 这个才是关键 tr_natpmpPulse(s->natpmp, private_peer_port, is_enabled,&public_peer_port);
//pmp 完成隐射
int tr_natpmpPulse (struct tr_natpmp * nat, tr_port private_port, bool is_enabled, tr_port * public_port)
{
int ret;
//如果is_enabled 为true,当前的状态处于TR_NATPMP_DISCOVER
if (is_enabled && (nat->state == TR_NATPMP_DISCOVER))
{
//首先执行pmp初始化操作
int val = initnatpmp (&nat->natpmp, 0, 0);
printf("initnatpmp %d \n",val);
//logVal ("initnatpmp", val);
val = sendpublicaddressrequest (&nat->natpmp);
//logVal ("sendpublicaddressrequest", val);
printf("sendpublicaddressrequest %d \n", val);
nat->state = val < 0 ? TR_NATPMP_ERR : TR_NATPMP_RECV_PUB;
//标识发现完成
nat->has_discovered = true;
//赋值 command_time ,也即是下一个command发送的时间
setCommandTime (nat);
}
//如果上面一个步骤没有出现错误 默认状态为 TR_NATPMP_RECV_PUB ,再判断当前的时间是否到了可以发送下一个command的时间
if ((nat->state == TR_NATPMP_RECV_PUB) && canSendCommand (nat))
{
natpmpresp_t response;
//调用pmp函数,得到结果
const int val = readnatpmpresponseorretry (&nat->natpmp, &response);
//logVal ("readnatpmpresponseorretry", val);
//printf ("readnatpmpresponseorretry %d \n", val);
//如果结果大于0,打印的得到的外网的ip
if (val >= 0)
{
char str[128];
evutil_inet_ntop (AF_INET, &response.pnu.publicaddress.addr, str, sizeof (str));
//tr_logAddNamedInfo (getKey (), _("Found public address \"%s\""), str);
printf ("Port Forwarding (NAT-PMP) Found public address %s \n", str);
//同时状态为 TR_NATPMP_IDLE
nat->state = TR_NATPMP_IDLE;
}
else if (val != NATPMP_TRYAGAIN)
{
//出现了错误
nat->state = TR_NATPMP_ERR;
}
}
//判断是否需要删除之前的隐射
if ((nat->state == TR_NATPMP_IDLE) || (nat->state == TR_NATPMP_ERR))
{
//is_mapped 代表之前已经隐射成功过,如果是这样,就要先删除之前的隐射
if (nat->is_mapped && (!is_enabled || (nat->private_port != private_port)))
{
nat->state = TR_NATPMP_SEND_UNMAP;
}
}
//判断是否需要删除之前的隐射 并且当前的时间达到了下一个command执行的时间
if ((nat->state == TR_NATPMP_SEND_UNMAP) && canSendCommand (nat))
{
//调用pmp库 发起端口隐射
const int val = sendnewportmappingrequest (&nat->natpmp, NATPMP_PROTOCOL_TCP,
nat->private_port,
nat->public_port,
0);
//logVal ("sendnewportmappingrequest", val);
printf("sendnewportmappingrequest %d \n", val);
//赋值状态
nat->state = val < 0 ? TR_NATPMP_ERR : TR_NATPMP_RECV_UNMAP;
//标识下一个command 执行的时间
setCommandTime (nat);
}
...
}
tr_upnpPulse(s->upnp, private_peer_port, is_enabled, do_check);
//doPortCheck 代表是否需要隐射,如果为false代表不需要隐射,执行验证
int tr_upnpPulse(tr_upnp * handle, int port, int isEnabled, int doPortCheck) {
int ret;
//默认的状态 为 TR_UPNP_DISCOVER
if (isEnabled && (handle->state == TR_UPNP_DISCOVER)) {
struct UPNPDev * devlist;
//执行upnp的发现,主要用来搜索局域网中所有的UPNP设备
devlist = tr_upnpDiscover(2000);
errno = 0;
//获取有效的IGD
if (UPNP_GetValidIGD(devlist, &handle->urls, &handle->data,handle->lanaddr, sizeof(handle->lanaddr)) == UPNP_IGD_VALID_CONNECTED) {
//tr_logAddNamedInfo(getKey(), _( "Found Internet Gateway Device \"%s\""),handle->urls.controlURL);
printf("Port Forwarding (UPnP) Found Internet Gateway Device %s \n",handle->urls.controlURL);
//tr_logAddNamedInfo(getKey(), _( "Local Address is \"%s\""),handle->lanaddr);
printf("Port Forwarding (UPnP) Local Address is %s \n",handle->lanaddr);
//赋值状态为TR_UPNP_IDLE
handle->state = TR_UPNP_IDLE;
//当前已经执行了发现
handle->hasDiscovered = true;
} else {
//出现了错误
handle->state = TR_UPNP_ERR;
//获取无效的IGD,也即是你的路由器不支持
//tr_logAddNamedDbg(getKey(), "UPNP_GetValidIGD failed (errno %d - %s)", errno, tr_strerror (errno));
printf("Port Forwarding (UPnP) UPNP_GetValidIGD failed (errno %d - %s) \n", errno, tr_strerror (errno));
//tr_logAddNamedDbg(getKey(),"If your router supports UPnP, please make sure UPnP is enabled!");
printf("Port Forwarding (UPnP) If your router supports UPnP, please make sure UPnP is enabled! \n");
}
freeUPNPDevlist(devlist);
}
//判断当前是否需要关掉之前隐射的关系
if (handle->state == TR_UPNP_IDLE) {
if (handle->isMapped && (!isEnabled || (handle->port != port)))
{
handle->state = TR_UPNP_UNMAP;
}
}
//如果当前已经完成了隐射,判断是否需要检查端口
if (isEnabled && handle->isMapped && doPortCheck) {
//upnp 端口隐射,这里有tcp,udp,检查tcp 或者 udp
if ((tr_upnpGetSpecificPortMappingEntry(handle, "TCP") != UPNPCOMMAND_SUCCESS) || (tr_upnpGetSpecificPortMappingEntry(handle, "UDP") != UPNPCOMMAND_SUCCESS)) {
//出现了错误,标识没有隐射完成
//tr_logAddNamedInfo(getKey(), _("Port %d isn't forwarded"), handle->port);
printf("Port Forwarding (UPnP) Port %d isn't forwarded \n",handle->port);
//如果tcp,udp检查都有问题,标识没有隐射成功
handle->isMapped = false;
}
}
//删除隐射
if (handle->state == TR_UPNP_UNMAP) {
//删除tcp ,udp隐射
tr_upnpDeletePortMapping(handle, "TCP", handle->port);
tr_upnpDeletePortMapping(handle, "UDP", handle->port);
//tr_logAddNamedInfo(getKey(),_("Stopping port forwarding through \"%s\", service \"%s\""),handle->urls.controlURL, handle->data.first.servicetype);
printf("Port Forwarding (UPnP) Stopping port forwarding through %s service %s \n",handle->urls.controlURL, handle->data.first.servicetype);
//删除隐射,通知状态,比如port为-1
handle->isMapped = 0;
handle->state = TR_UPNP_IDLE;
handle->port = -1;
}
...
}
这俩个函数涉及到的内容比较多,具体去看源码的实现,下面看set_evtimer_from_status ,这个函数会设计到定时器的时间设置
//根据状态来决定定时器的时间间隔
static void set_evtimer_from_status(tr_shared * s) {
int sec = 0, msec = 0;
/* when to wake up again */
switch (tr_sharedTraversalStatus(s)) {
case TR_PORT_MAPPED:
//如果当前我们已经隐射成功了,那么20分钟之后再来检查
/* if we're mapped, everything is fine... check back in 20 minutes
* to renew the port forwarding if it's expired */
//将doPortCheck置位true
s->doPortCheck = true;
sec = 60 * 20;
break;
case TR_PORT_ERROR:
//如果出现了错误,那么60秒之后再来
/* some kind of an error. wait 60 seconds and retry */
sec = 60;
break;
default:
/* in progress. pulse frequently. */
msec = 333000;
break;
}
//添加定时器
if (s->timer != NULL)
{
tr_timerAdd(s->timer, sec, msec);
}
}
Aria2 移植upnp,pmp
首先我们需要将这俩个库引进来,对应的CmakeList中添加要编译的内容
#添加头文件的查找目录
include_directories(${CMAKE_SOURCE_DIR}/src/main/cpp/src/includes
${CMAKE_SOURCE_DIR}/src/main/cpp/src/includes/libutp
${CMAKE_SOURCE_DIR}/src/main/cpp/src/includes/libnatpmp
${CMAKE_SOURCE_DIR}/src/main/cpp/src/includes/miniupnp
${CMAKE_SOURCE_DIR}/src/main/cpp/third/includes )
...
set(libnatpmp
${My_ARIC_SRC}/libnatpmp/getgateway.c
${My_ARIC_SRC}/libnatpmp/natpmp.c
${My_ARIC_SRC}/libnatpmp/wingettimeofday.c )
set(libupnp
${My_ARIC_SRC}/miniupnp/connecthostport.c
${My_ARIC_SRC}/miniupnp/igd_desc_parse.c
${My_ARIC_SRC}/miniupnp/minisoap.c
${My_ARIC_SRC}/miniupnp/minissdpc.c
${My_ARIC_SRC}/miniupnp/miniupnpc.c
${My_ARIC_SRC}/miniupnp/miniwget.c
${My_ARIC_SRC}/miniupnp/minixml.c
${My_ARIC_SRC}/miniupnp/portlistingparse.c
${My_ARIC_SRC}/miniupnp/receivedata.c
${My_ARIC_SRC}/miniupnp/upnpcommands.c
${My_ARIC_SRC}/miniupnp/upnpreplyparse.c )
#之后,添加编译
add_library( # Sets the name of the library.
Aria
# Sets the library as a shared library.
SHARED
${AriaSrc}
${am__append_1_4}
${am__append_6_22}
${am__append_23_29}
${am__append_30}
${am__append_31}
${wslay_Src}
${libutp}
${libnatpmp}
${libupnp}
#自己的源码文件
src/main/cpp/Aria2AndroidJni.cpp
)
CmakeList目录结构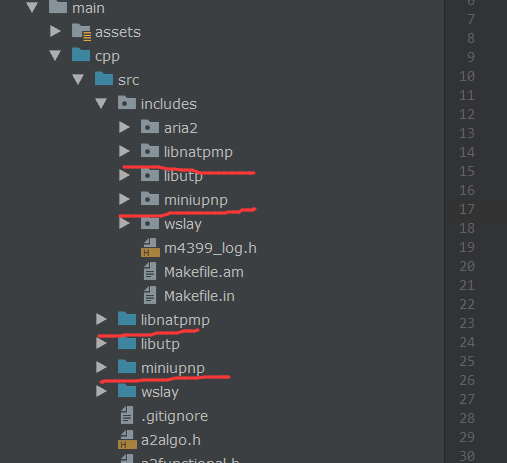
transmission中代码为C风格,这里要改成C++11的方式 ,接下来就是对应的移植了
首先 我们也要搞一个开关配置,具体怎么添加,可以参照源码原本的添加过程
//设置允许端口隐射
gloableOptions.push_back(std::pair<std::string,std::string> ("bt-enable-port-forward","true"));
对于这种端口映射,我们并不是针对单个种子,而是针对所有的种子,这样都可以共用这个隐射,所以我们的初始化,放在Dht初始化
//判断是否允许端口隐射
if(e->getOption()->getAsBool(PREF_ENABLE_PORT_FORWARD))
{
//构建一个共享的智能指针对象交给BtRegister保存,这样当BtRegistry销毁的时候,这个对象就会被销毁了
auto portForward = std::make_shared<BtPortForward>();
//将BtPortForward 对象保存在 BtRegister中,这样当BtRegister销毁的时候,这个对象才会被销毁 由于 make_shared 引用为0 才会销毁
e->getBtRegistry()->setBtPortForward(portForward);
//构建BtPortForwardCommand对象,调用对应的构造函数完成初始化 用于监听端口隐射变化
auto c = make_unique<BtPortForwardCommand>(e->newCUID(), e);
c->setBtPortForward(portForward);
//添加到commands集合中 ,move之后,这个对象就转移了不可以用了
tempCommands.push_back(std::move(c));
}
我们的BtPortForward 就相当于transmission 中的tr_shared对象
//端口隐射
class BtPortForward {
private:
//标识是否允许
bool isEnabled;
//标识是否正在关闭
bool isShuttingDown;
//标识是否需要端口检查
bool doPortCheck;
//pmp 协议 状态
BtPortForwarding natpmpStatus_;
//upnp 协议状态
BtPortForwarding upnpStatus_;
//对应的 upnp的协议的 对象指针
std::shared_ptr<BtUpnp> _upnp;
//对应的 pmp 协议的 对象指针
std::shared_ptr<BtNatpmp> _natpmp;
}
对于transmission的 定时器我们采用 Command
class BtPortForwardCommand : public Command {
private:
DownloadEngine* e_;
std::shared_ptr<BtPortForward> portForward_;
//检查的时间点
Timer checkPoint_;
//刷新的时间点
std::chrono::milliseconds refreshInterval_;
int tr_sharedTraversalStatus();
void natPulse(bool status);
void set_evtimer_from_status();
public:
BtPortForwardCommand(cuid_t cuid, DownloadEngine* e);
virtual bool execute() CXX11_OVERRIDE;
void setBtPortForward(const std::shared_ptr<BtPortForward>& portForward);
};
所以我们的command execute代码可以这样写
//command命令的执行,用来执行校验端口隐射
bool BtPortForwardCommand::execute() {
//当前引擎退出的还是才会回收这个command对象
if (e_->getRequestGroupMan()->downloadFinished() || e_->isHaltRequested()) {
//LOGD("BtPortForwardCommand return true");
return true;
}
//检查是否到了刷新的时间点
if(checkPoint_.difference(global::wallclock()) >= refreshInterval_)
{
//重置刷新的时间
checkPoint_ = global::wallclock();
LOGD("BtPortForwardCommand::execute time to exec");
/* do something */
natPulse(portForward_->getDoPortCheckStatus());
//将doPortCheck置位false
portForward_->setDoPortCheckStatus(false);
//根据不同的状态决定定时器触发的时间
set_evtimer_from_status();
}
//下次再触发检查
e_->addRoutineCommand(std::unique_ptr<Command>(this));
return false;
}
/**
* 依据情况更改检查端口的时间点
*/
void BtPortForwardCommand::set_evtimer_from_status() {
int msec = 0;
/* when to wake up again */
switch (tr_sharedTraversalStatus()) {
case TR_PORT_MAPPED:
//如果当前我们已经隐射成功了,那么20分钟之后再来检查
/* if we're mapped, everything is fine... check back in 20 minutes
* to renew the port forwarding if it's expired */
//将doPortCheck置位true
portForward_->setDoPortCheckStatus(true);
msec = 60 * 20 * 1000;
break;
case TR_PORT_ERROR:
//如果出现了错误,那么60秒之后再来
/* some kind of an error. wait 60 seconds and retry */
msec = 60 * 1000;
break;
default:
/* in progress. pulse frequently. */
msec = 333000;
break;
}
LOGD("BtPortForwardCommand::set_evtimer_from_status msec %d",msec);
//看情况的更改下次检查的刷新时间点
refreshInterval_ = std::chrono::milliseconds(msec);
}
BtNatpmp 对象就跟 transmission 中的 struct tr_natpmp,只不过我们把他封装起来,比如 natPmpPulse
class BtNatpmp {
private:
//标识是否已经发现
bool has_discovered;
//标识是否已经mapped
bool is_mapped;
//隐射完成之后 得到的外网端口号
int public_port_;
//隐射的内网端口号
int private_port_;
unsigned int renew_time;
//下一个command 发送的时间
unsigned int command_time;
//pmp 当前的状态
tr_natpmp_state state;
//真正的pmp 库对象
natpmp_t natpmp;
void setCommandTime ();
bool canSendCommand ();
public:
BtNatpmp();
~BtNatpmp();
int natPmpPulse(int private_port,bool is_enable,int * public_port);.
}
BtUpnp 对象就跟 transmission 中的struct tr_upnp ,只不过我们把他封装起来,比如 tr_upnpPulse
class BtUpnp {
private:
//标识是否发现
bool hasDiscovered;
struct UPNPUrls urls;
struct IGDdatas data;
//上一次upnp 隐射的本地局域网
int port_;
char lanaddr[16];
//标识是否隐射完成
bool isMapped;
//upnp的状态
tr_upnp_state state;
struct UPNPDev * tr_upnpDiscover(int msec);
int tr_upnpGetSpecificPortMappingEntry(const char * proto);
int tr_upnpAddPortMapping(const char * proto, int port, const char * desc);
void tr_upnpDeletePortMapping( const char * proto, int port);
public:
BtUpnp();
~BtUpnp();
int tr_upnpPulse(int port, int isEnabled, int doPortCheck);
};
再次回到初始化的地方
//判断是否允许端口隐射,端口隐射是针对所有的种子,并不是针对单个种子
if(e->getOption()->getAsBool(PREF_ENABLE_PORT_FORWARD))
{
//构建一个共享的智能指针对象交给BtRegister保存,这样当BtRegistry销毁的时候,这个对象就会被销毁了
auto portForward = std::make_shared<BtPortForward>();
//将BtPortForward 对象保存在 BtRegister中,这样当BtRegister销毁的时候,这个对象才会被销毁 由于 make_shared 引用为0 才会销毁
e->getBtRegistry()->setBtPortForward(portForward);
...
}
Aria2 释放操作
由于我们采用的是智能指针,所以不用关心对象的销毁动作,比如 BtPortForward ,我们把他保存到了 BtRegistery中,这样当BtRegistery销毁的时候,这个BtPortForward的引用才会变成0,进而完成它的销毁操作,又因为 BtPortForward 中以智能指针的方式持有 BtUpnp,BtNatpmp 的引用,所以对应 BtUpnp,BtNatpmp 只要以智能指针的方式初始化,之后设置到这个对象中,对应这俩个对象也不用管理销毁的操作
//对应的 upnp的协议的 对象指针
std::shared_ptr<BtUpnp> _upnp;
//对应的 pmp 协议的 对象指针
std::shared_ptr<BtNatpmp> _natpmp;
//如果为空,创建对应的pmp对象
if (!portForward_->getNatPmp())
{
portForward_->setBtNatpmp(std::make_shared<BtNatpmp>());
}
//如果为空,创建对应的upnp 对象
if (!portForward_->getBtUpnp())
{
portForward_->setBtUpnp(std::make_shared<BtUpnp>());
}
相应的我们可以在这俩个对象的虚构函数中,完成销毁的操作,比如退出的时候,删除之前的隐射关系
BtNatpmp::~BtNatpmp()
{
if(is_mapped)
{
//判断是否需要删除之前的隐射 并且当前的时间达到了下一个command执行的时间
const int val = sendnewportmappingrequest (&natpmp, NATPMP_PROTOCOL_TCP, private_port_, public_port_, 0);
LOGD("is_mapped BtNatpmp::~BtNatpmp delete Port Forward", val);
}
closenatpmp (&natpmp);
//LOGD("BtNatpmp 虚构函数执行");
}
BtUpnp::~BtUpnp()
{
if(isMapped)
{
//删除隐射
tr_upnpDeletePortMapping("TCP", port_);
tr_upnpDeletePortMapping("UDP", port_);
//tr_logAddNamedInfo(getKey(),_("Stopping port forwarding through \"%s\", service \"%s\""),handle->urls.controlURL, handle->data.first.servicetype);
LOGD("BtUpnp::~BtUpnp Stopping port forwarding through %s service %s \n", urls.controlURL, data.first.servicetype);
//删除隐射,通知状态,比如port为-1
isMapped = false;
state = TR_UPNP_IDLE;
port_ = -1;
}
if (hasDiscovered)
{
FreeUPNPUrls(&urls);
}
//LOGD("BtUpnp 虚构函数执行");
}
Aria2 移植成功
比如当我们程序退出的时候查看释放的过程
在路由器上查看是否释放成功